据统计,今年国内具身智能领域融资总额已突破370亿元。
工信部与国务院国资委联合启动「人形机器人与具身智能实景实训专项行动」,央广网直接把今年定义为「商业化落地关键年」。一级市场的钱、二级市场的故事,全都在喊同一个方向:落地、落地、落地。
但问题来了,具身智能到底应该怎么落地?
大家都比较认可的观点是,具身智能应该去攻克人类做不到的事,应该去替代人类做一些高危、繁重、重复,人不想干也不该干的活。
6月22日,第四届中国国际供应链促进博览会在北京开幕,首次设立人工智能专区。
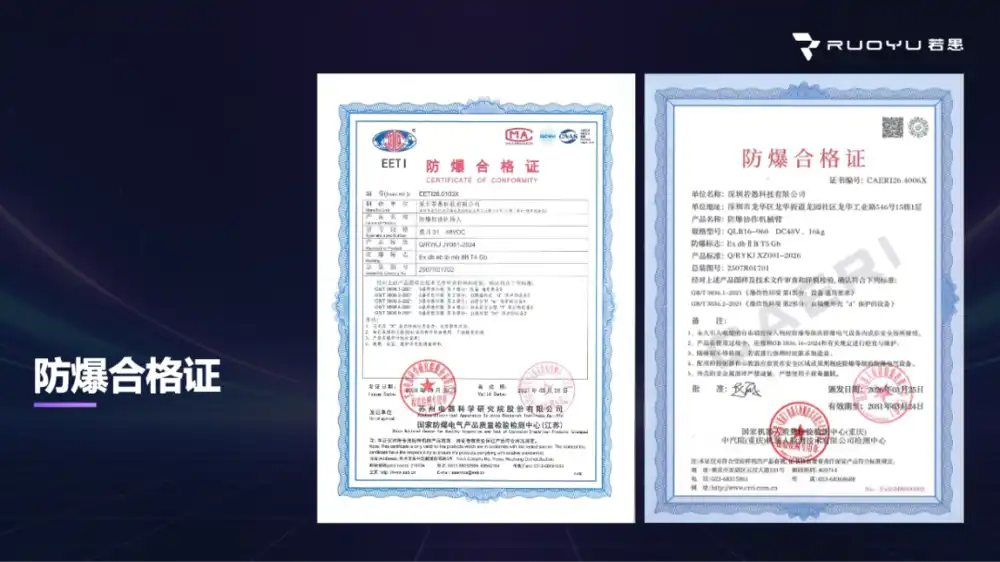
但想法归想法,要让机器人真正「进得去」这些场景,第一道关卡就足够劝退大多数公司:防爆认证。
在加油站、油气场站、化工厂等易燃易爆环境中,机器人自身绝对不能成为潜在的点火源。这对产品硬件在设计之初就提出了极其严苛的要求。比如说:从电路层面就要做本质安全设计,限制回路能量,确保即便发生故障也不足以引燃环境气体;机械结构要满足隔爆要求,承受内部爆炸而不损坏外壳;所有连接点要做增安处理,防止正常运行中产生火花风险;关键部件还要通过浇封手段隔绝危险接触等等。
具身智能能去哪里
这个场景对机器人的挑战集中在「精细操作的连贯性」上。车主下单后,机器人要连续完成十多个动作:掀外盖、拧内盖、从枪座上摘下油枪、瞄准油口插入、等待加满、拔枪、挂回枪座、盖内盖、合外盖。每个动作的容差只有几毫米,任何一步卡住都意味着整条链中断。而且不同车型的油箱位置、盖板结构、开启方式千差万别,机器人不可能靠固定程序跑通所有情况。
场站巡检的痛点和加油站完全不同。加油站考验的是精细操作,场站考验的是「长时间自主巡逻+多种异常识别+现场即时响应」的综合能力。巡检员每天走固定路线,这份工作枯燥、危险,而且对注意力的要求极高,人连续巡检几个小时后遗漏率会显著上升。
港口场景:多机器人协同的探索
这个场景最特殊的地方在于,它天然需要多台机器人协同。
目前大多数具身智能系统的架构是「流水线式」的,视觉模块负责看,语言模块负责理解,动作模块负责执行。
这种架构处理短序列、低干扰的简单任务还行,一旦遇到十几步连续操作、环境高度动态、容错率极低的场景,中间任何一步的微小偏差都会像多米诺骨牌一样向后传导。传统流水线架构在这种量级的任务面前,几乎不可能保证端到端的稳定性。
世界模型驱动的预测能力
在加油站场景中,具身智能面对的任务链极长:停车引导、识别油箱位置、开外盖、开内盖、取枪、对准油口、插入、加注、拔出、收枪、关内盖、关外盖。任何一步的微小偏差都会向后传导。
这种能力在长序列任务中尤其关键。加油不是一个「抓取-放置」的简单操作,它是一整条有前后因果关系的动作链。世界模型让具身智能具备了「看三步走一步」的前瞻能力。
用一个比喻来理解:一个老司机加油,不管油箱盖开得顺不顺利,脑子里始终清楚最终要达到什么状态,中间的每一步都围绕这个终态来调整。让具身智能从「线性执行」变为「终态对齐」。
第一,生成目标观测。系统接收到任务指令和当前摄像头画面后,先去预测「任务完成后,世界应该变成什么样」。例如加油任务结束后,油枪应该归位、油箱盖应该合上。这个预测出来的「终态画面」就是目标观测,它为后续所有推理过程提供了一个明确的语义锚点。
第二,合成中间过渡帧。有了目标之后,系统再倒推中间应该经历哪些视觉状态。如果起点是「油箱盖关着」、终点是「油枪归位、油箱盖合上」,那中间就需要依次出现「油箱盖打开」「油枪取出」「油枪插入油口」等过渡画面。这些合成出来的中间观测帧,为动作生成提供了逐步对齐的视觉参考。
这套机制让机器人在动手之前就对整个任务过程有了完整的视觉想象,后续的动作规划都围绕这条「想象的轨迹」展开,从而大幅降低了长序列执行中的累积偏差。
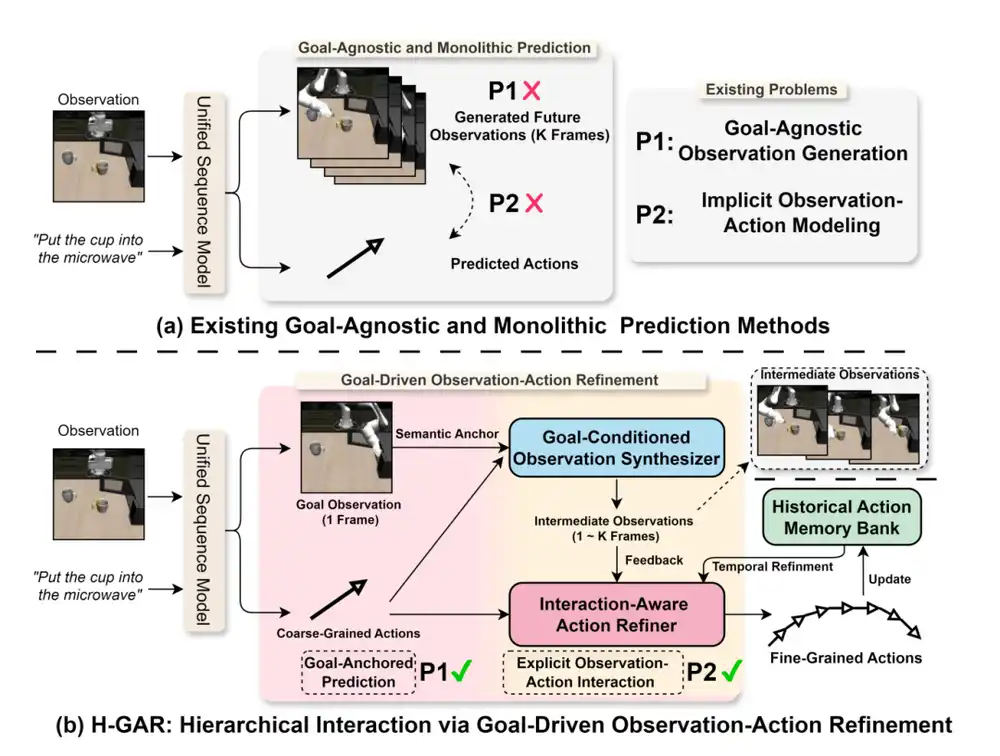
(a)现有方法通常采用目标无关、整体式的预测范式。(b)H-GAR引入了目标条件观测合成器和交互感知动作优化器,从而实现了以目标为锚定的预测,并显式建模观测与动作之间的交互。
具体而言,H-GAR的工作流程分为三步:
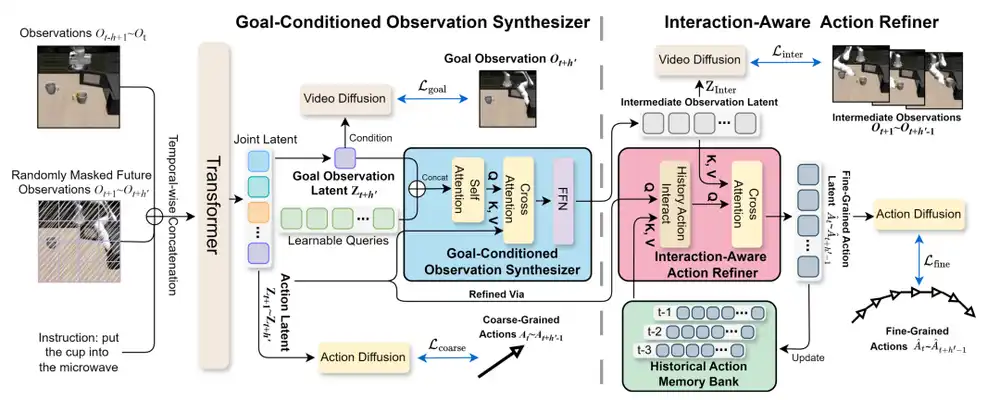
H-GAR架构图
第一步:粗粒度动作草案。基于历史画面和任务指令,系统首先生成一组粗略的动作序列。这些动作描述了一条从当前状态到目标的「大致路径」,类似于人类加油时脑子里的粗略计划,知道大概要做哪些步骤,是执行前的准备。
第二步:目标条件观测合成(GOS模块)。拿到粗粒度动作后,系统在目标观测的引导下合成中间视觉帧。这一步的关键在于:合成的画面不是随便生成的,而是同时受到目标终态和粗动作的双重约束。这确保了中间过渡帧既符合动作逻辑,又对齐了最终目标。
第三步:交互感知动作精炼(IAAR模块)。最后一步将粗动作升级为精细的可执行指令。IAAR从两个方向获取反馈来精炼动作:一是中间观测帧提供的视觉上下文,让动作与实际场景对齐;二是历史动作记忆库,它记录了此前执行过的精细动作,确保当前生成的动作与历史轨迹保持时序一致性。当记忆库超过容量阈值时,系统采用相似度淘汰策略,合并最相似的相邻动作来保持记忆多样性。
论文地址:https://arxiv.org/pdf/2511.17079
真实场景里意外几乎是常态。油箱盖可能打开角度不对,车主停车位置可能偏移预期,甚至油口周围可能有异物遮挡。在实验室里一百次能成功九十九次的动作,放到户外真实环境可能打个七折。
尾声:知行合一
让具身智能走向特种场景,是一件需要有长期主义精神的事情。
要进入特种行业,机械结构设计必须从底层考虑安全性,必须要有研发具身本体的能力。而在特殊场景下执行任务,具身大脑更是不可或缺。大脑与本体的深度耦合已经超越了加分项,它就是准入条件。
当具身智能行业集体站在商业化落地的十字路口,那些最早跑通「大脑-本体-数据」闭环的玩家,大概率会在接下来的竞争中占据先手。
本文来自微信公众号: 机器之心 ,编辑:冷猫,作者:关注具身智能的,原文标题:《国内首张防爆资质、全球首个加油大脑方案,他们凭什么拿下两个「第一」》