Unitree dipilih oleh NVIDIA, tetapi NVIDIA tidak memilih tangan Unitree.
Bersamaan dengan keberhasilannya melewati persetujuan IPO di STAR Market, robot H2 Plus milik Unitree Technology juga ditunjuk oleh NVIDIA sebagai bodi referensi robot humanoid NVIDIA Isaac GR00T yang dirilis NVIDIA.
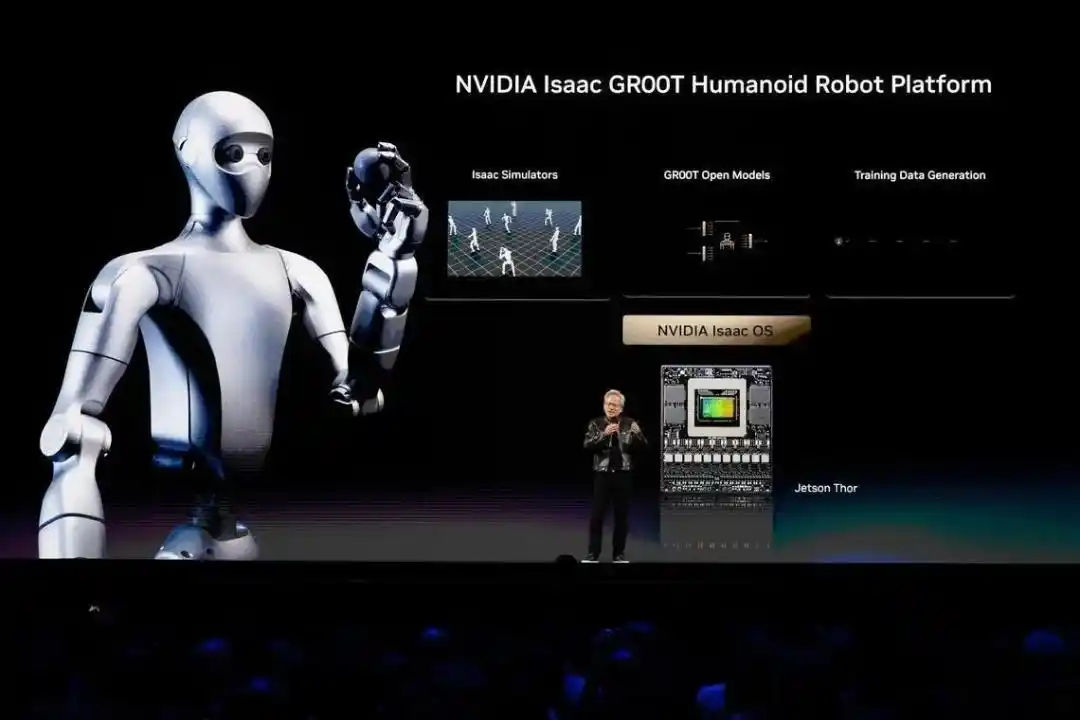
Kerjasama kuat ini membuat dunia embodied intelligence dan AI heboh. Bagaimanapun, posisi NVIDIA di industri tidak perlu diragukan lagi, sementara Unitree, dengan kemampuan kontrol gerak robotnya yang luar biasa, telah masuk ke jajaran teratas robot humanoid global.
Namun yang benar-benar mengejutkan adalah, robot referensi ini tidak menggunakan tangan lincah milik Unitree sendiri, melainkan diganti dengan Sharpa Wave.
Sharpa adalah perusahaan tangan lincah yang baru berdiri dua tahun, berkantor pusat di Singapura, dengan tim inti berasal dari tim tangan lincah yang dibentuk Hesai Technology pada 2024. Sharpa tidak sepopuler Unitree, dan juga tidak sering muncul di berita pendanaan seperti Lingxinqiaoshou atau Linjiedian.
Tahun ini di Gala Tahun Baru Imlek, tangan lincah Sharpa juga muncul dalam program Shen Teng dan Ma Li "My Most Unforgettable Tonight". Tetapi melihat lini sektor tangan lincah, Sharpa masih sangat rendah profil.

Sekarang, Sharpa bersama Unitree berdiri di meja permainan embodied intelligence NVIDIA.
Satu bertanggung jawab atas tubuh, satu bertanggung jawab atas kedua tangan.
Hanya saja, perusahaan tangan lincah yang baru berdiri dua tahun, mengapa dipilih NVIDIA?
Tangan Unitree, Kali Ini Kalah
Sebenarnya, Unitree bukan tidak punya tangan lincah sendiri.
Dari lini produk yang diumumkan, Unitree telah meluncurkan seri tangan lincah Dex, dengan tata letak dari skema tiga jari hingga skema lima jari, dan performanya juga tidak buruk.
Tetapi yang mungkin diinginkan NVIDIA kali ini, bukan hanya sebuah "tangan yang bisa dipasang di robot humanoid".
Dari perspektif rute teknologi, tangan lincah Sharpa memang memiliki kelebihan.
Pada tahun 2024, Hesai Technology membentuk tim tangan lincah, yang merupakan cikal bakal Sharpa. Dari LiDAR Hesai Technology ke tangan lincah, Sharpa tampak agak "lintas batas".
Dalam kesan banyak orang, mobil otonom dan robot adalah dua industri yang sama sekali berbeda.
Tetapi bagi perusahaan seperti Hesai, sebenarnya ada akumulasi teknologi bersama di antara keduanya.
Mobil otonom mengharuskan mesin merasakan, memahami, dan membuat keputusan secara real-time di lingkungan kompleks, menuntut presisi sensor, keandalan sistem, dan kemampuan rekayasa yang tinggi. Ketika robot memasuki dunia nyata untuk melakukan tugas, mereka juga akan menghadapi masalah serupa.
Bedanya, mobil otonom menyelesaikan "bagaimana mobil melihat dunia", sedangkan tangan lincah menyelesaikan "bagaimana robot menyentuh dunia".
Karena itulah, Sharpa memindahkan kemampuan masa lalu ke jalur lain. Tidak lama setelah didirikan, Sharpa meluncurkan produk unggulannya, tangan lincah Sharpa Wave.

Di bidang tangan lincah, ada kontradiksi yang sudah lama ada: kinerja dan produksi massal seringkali sulit dipadukan.
Beberapa produk menggunakan skema underactuated, mengontrol banyak sendi dengan sedikit motor, biayanya relatif rendah, tetapi fleksibilitas dan presisi kontrol menjadi terbatas; produk lain mengejar kemampuan mendekati tangan manusia, strukturnya kompleks, harganya mahal, dan sulit diproduksi massal.
Sharpa memilih rute di antara keduanya.
Sharpa Wave memiliki 22 derajat kebebasan aktif, dengan ukuran keseluruhan mendekati rasio 1:1 dengan telapak tangan manusia. Untuk mendapatkan presisi kontrol yang lebih tinggi, ia menggunakan arsitektur transmisi direct-drive, meningkatkan kecepatan respons sendi dan kemampuan kontrol gerak.
Tetapi dibandingkan angka derajat kebebasan, yang lebih inti adalah investasi Sharpa pada sistem taktil.
Di industri robot humanoid, tren yang semakin jelas adalah: hanya mengandalkan penglihatan sudah tidak bisa memenuhi kebutuhan operasi yang kompleks.
Sharpa mengembangkan sistem taktil bernama Dynamic Tactile Array (DTA). Di dalam setiap ujung jari terintegrasi kamera mikro dan lebih dari 1000 unit persepsi taktil, memungkinkan robot merasakan perubahan tekanan, juga mengenali tekstur, geseran, dan status kontak, mendapatkan "umpan balik taktil" yang mirip dengan ujung jari manusia.
Menurut data yang diungkapkan Sharpa, presisi persepsi taktilnya dapat mencapai tingkat 0.005N, frekuensi refresh mencapai 180Hz; frekuensi kontrol seluruh tangan mencapai 500Hz, keluaran gaya satu ujung jari lebih dari 20N.
Parameter-parameter ini semuanya menuju pada tujuan yang sama: memberikan robot kemampuan untuk benar-benar menangani objek di dunia nyata.
Ini tidak sepenuhnya sama dengan arah tangan lincah milik Unitree sendiri.
Seri Dex Unitree lebih dekat dengan sistem keseluruhan robotnya sendiri. Baik skema tiga jari maupun lima jari, fokusnya adalah agar robot dapat menyelesaikan pengambilan dan operasi dalam tubuhnya sendiri, kontrol gerak, dan ekosistem pengembangan.
Artinya, bukan berarti tangan Unitree tidak bagus, hanya saja untuk robot referensi NVIDIA ini, tangan Sharpa lebih memenuhi persyaratan.
Jadi, nilai Sharpa Wave terletak pada mengubah hal "menyentuh dunia" menjadi pintu masuk data yang dapat dirasakan, diberi umpan balik, dan dilatih oleh robot.
Tetapi parameter tetaplah parameter, untuk membuktikan tangan lincah benar-benar memiliki kemampuan "menyentuh dunia", harus direalisasikan dalam tugas-tugas konkret.
Dan alasan Sharpa mendapat perhatian pasar, adalah karena mereka mengubah parameter-parameter ini menjadi serangkaian demonstrasi operasi yang membuat rekan sejawat terkesan.
Tangan Lincah yang Seksi, Membagikan Kartu Secara Online
Di pameran produk IROS 2025 (International Conference on Intelligent Robots and Systems), sebuah demonstrasi Sharpa meninggalkan kesan mendalam di industri: sebuah tangan lincah Sharpa mengambil satu kartu dari setumpuk kartu di tangan lainnya dan meletakkannya di atas meja.

Alasan yang meninggalkan kesan mendalam adalah karena aksi membagikan kartu remi ini menuntut presisi kontrol gaya yang sangat tinggi dari tangan lincah, serta kemampuan prediksi terhadap kartu yang tergelincir dan keluar.
Selain itu, Sharpa juga merilis serangkaian video demonstrasi: mengupas kulit telur secara mandiri, mengupas kulit apel, membagikan kartu remi, melipat kincir angin kertas, bahkan menyelesaikan perakitan casing PC: termasuk memasukkan kartu grafis dengan presisi dan mengencangkan sekrup pengikat.
Tugas-tugas ini mungkin terlihat seperti demo yang menarik, tetapi bagi industri robot, mereka mewakili tingkat kesulitan teknologi yang sangat berbeda. Karena menggenggam sebuah objek tidaklah sulit, yang benar-benar sulit adalah mengontrol proses kontaknya.
Robot dapat dengan mudah mengambil sebuah telur, tetapi belum tentu tahu kapan harus menambah gaya, kapan harus mengurangi gaya; dapat mengenali sebuah kartu remi, tetapi sulit memastikan kertas tidak jatuh atau berubah bentuk.
Dan banyak kemampuan yang ditunjukkan Sharpa, pada dasarnya menuju pada pertanyaan yang sama: dapatkah robot, seperti manusia, terus menyesuaikan gerakannya melalui umpan balik taktil.
Dalam proses ini, sistem taktil DTA mulai berperan.
Saat robot menyentuh objek, ujung jari dapat merasakan perubahan tekanan, status gesekan, dan tren geser objek secara real-time, dan memberikan umpan balik ke sistem kontrol untuk penyesuaian dinamis. Objek lunak atau mudah pecah seperti telur, kertas, buah, justru paling mampu menunjukkan nilai sistem ini.
Pada saat yang sama, Sharpa juga tidak puas hanya menjadi pemasok tangan lincah, pada tahun 2026, perusahaan secara resmi meluncurkan robot humanoid utuh pertamanya: Sharpa North.
Di CES 2026, North menyelesaikan demonstrasi bermain tenis meja, mengambil foto menggunakan tongsis selfie, membagikan kartu remi. Dan yang paling representatif adalah tugas perakitan kincir angin kertas mandiri yang melibatkan lebih dari 30 langkah.
Dari mengenali komponen, mengambil bahan, hingga melipat, menyambung, dan menyelesaikan perakitan, seluruh proses berlangsung beberapa menit, melibatkan banyak operasi koordinasi dua tangan dan perencanaan gerak berurutan. Ini berarti, robot Sharpa memiliki kemungkinan untuk menyelesaikan tugas yang panjang dan melibatkan banyak langkah.
Dari tangan lincah ke robot humanoid, dari pemasok perangkat keras ke pengembang sistem full-stack, rute Sharpa sebenarnya semakin jelas:
Sharpa tidak puas hanya menjadi komponen robot. Yang benar-benar ingin dilakukan Sharpa adalah menjadi bagian dari platform embodied intelligence generasi berikutnya.
Dan platform, tepatnya juga kata kunci dari robot referensi NVIDIA ini.
Jika demonstrasi sebelumnya membuktikan tangan Sharpa ini dapat menyelesaikan operasi kompleks, maka pertanyaan yang lebih krusial selanjutnya adalah: tangan seperti ini, apa yang dapat dibawa untuk NVIDIA?
Rekan Bersaing Mengejar-ngejar untuk Mengguncang Meja
Bagi Sharpa, dipilih oleh NVIDIA tentu merupakan momen penting.
Namun tempat yang lebih kunci adalah, dalam robot referensi ini, Sharpa berada di posisi yang cukup krusial.
Karena dengan membuat "robot referensi", NVIDIA ingin membangun fondasi pengembangan yang dapat digunakan kembali untuk industri embodied intelligence, memungkinkan pengembang, lembaga penelitian, dan perusahaan robot, semuanya dapat melakukan pelatihan, validasi, dan pengembangan di sekitar skema ini.
Dalam skema ini, Unitree menyediakan bodi. Dengan kemampuan kontrol geraknya, Unitree menyelesaikan bagaimana robot berdiri, berjalan, bergerak.
Sharpa melengkapi, bagaimana robot setelah berjalan di depan objek, benar-benar mengulurkan tangan untuk bekerja.
Tetapi bagi NVIDIA, ini belum semuanya.
Yang lebih penting, produk Sharpa telah dimasukkan ke dalam Isaac Lab. Ini adalah kerangka kerja pelatihan simulasi sumber terbuka paling inti dalam sistem robot NVIDIA.
Dalam segmen teleoperasi, operator manusia dapat mengontrol tangan lincah 22 derajat kebebasan melalui sarung tangan data, memetakan gerakan tangan menjadi aksi sendi robot secara real-time; aksi-aksi ini kemudian direkam, menjadi data untuk pembelajaran imitasi dan pelatihan strategi, berubah menjadi sampel yang dapat dilatih, digunakan kembali, dan dikembangkan di kemudian hari.
Karena itulah, Sharpa tidak mendapatkan tempat hardware biasa. Ia menyelip ke dalam seluruh alur proses NVIDIA mulai dari pengumpalan teleoperasi, pelatihan simulasi, evaluasi strategi, hingga penyebaran nyata, inilah nilai inti dari kerjasamanya dengan NVIDIA.
Tentu saja, dipilih NVIDIA tidak berarti Sharpa sudah mengunci kemenangan lebih awal, karena perubahan di jalur tangan lincah terlalu cepat.
Lebih dari setahun terakhir, modal hampir mengejar "tangan" ini ke depan: perusahaan-perusahaan seperti Lingxinqiaoshou, Linjiedian, Inshot Robot, AoYi Technology, Paxini Perception, semuanya berakselerasi dalam iterasi seputar derajat kebebasan tinggi, umpan balik taktil, presisi kontrol gaya, dan kemampuan produksi massal.
Ada yang berlomba dalam kecepatan pendanaan dan realisasi produk.
Misalnya Lingxinqiaoshou, sejak 2025 menyelesaikan beberapa putaran pendanaan berturut-turut, setelah putaran B+ 2026 valuasinya dilaporkan mencapai $3 miliar, target valuasi putaran pendanaan berikutnya bahkan dikabarkan mencapai $6 miliar; Inshot Robot juga menyelesaikan pendanaan putaran C1 dan C2 miliaran RMB pada 2026, terus menekan pada pengembangan teknologi operasi lincah, inovasi komponen inti, dan kemampuan pengiriman produk.
Ada yang berlomba dalam taktil.
Lini produk Paxini Perception sudah mencakup sensor taktil multi-dimensi, tangan lincah taktil seri DexH, robot humanoid TORA, dan pada Maret 2026 menyelesaikan pendanaan Seri B lebih dari RMB 1 miliar.
Tangan lincah generasi baru AoYi Technology juga sudah menempatkan keunggulan seperti sensor taktil high-density dot array, kemampuan persepsi tekanan 0.1N hingga 25N di bagian depan.
Ini berarti, hari ini adalah 22 derajat kebebasan, sistem taktil DTA, dan desain referensi NVIDIA, besok mungkin ada tangan baru, dengan biaya lebih rendah, stabilitas lebih tinggi, atau siklus data yang lebih kuat mengejar.
Namun setidaknya saat ini, NVIDIA sudah memberikan penilaian dengan caranya sendiri:
Ketika industri mulai beralih dari "siapa yang bisa membuat robot berjalan", ke "siapa yang bisa membuat robot bekerja", sepasang tangan yang cukup pintar, telah menjadi sama pentingnya dengan dua kaki.
Artikel ini berasal dari akun WeChat publik "Blue Character Plan", penulis: Chester