Según las estadísticas, el financiamiento total en el ámbito de la inteligencia corporeizada en China este año ha superado ya los 370 mil millones de yuanes.
El Ministerio de Industria y Tecnología de la Información y la Comisión Estatal para la Supervisión y Administración de los Activos Estatales han lanzado conjuntamente la 'Acción Especial de Formación Práctica en Escenarios Reales para Robots Humanoides e Inteligencia Corporeizada'. La red China National Radio ha definido directamente este año como 'el año clave para la comercialización'. El dinero del mercado primario, las historias del mercado secundario, todos claman hacia la misma dirección: implementación, implementación, implementación.
Pero surge la pregunta: ¿cómo se debe implementar realmente la inteligencia corporeizada?
La opinión generalmente aceptada es que la inteligencia corporeizada debería abordar tareas que los humanos no pueden hacer, debería sustituir a las personas en trabajos de alto riesgo, pesados, repetitivos, que los humanos no quieren ni deberían hacer.
El 22 de junio se inauguró en Pekín la cuarta edición de la Feria Internacional de la Cadena de Suministro de China, que por primera vez estableció una zona especial para la inteligencia artificial.
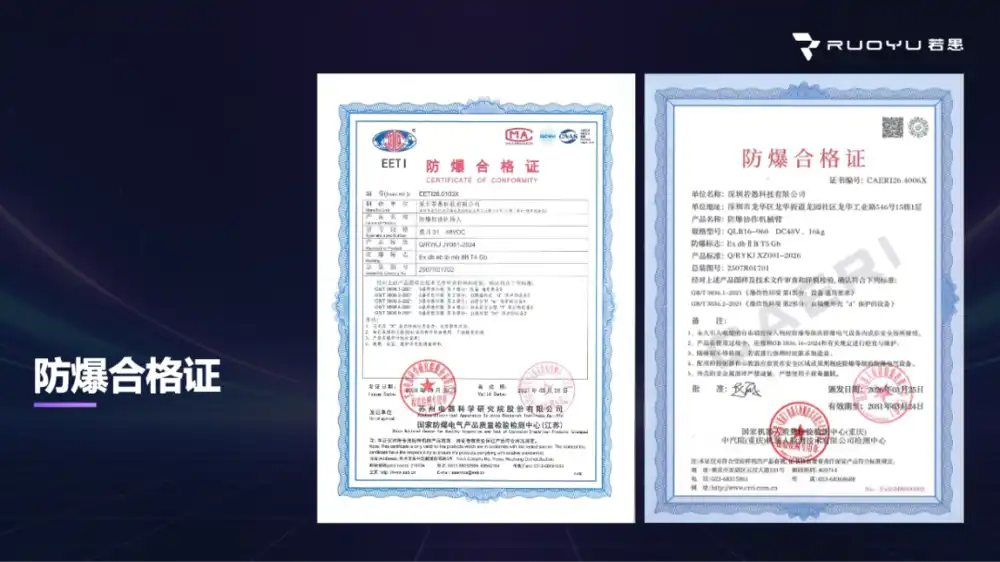
Pero las ideas son una cosa, y hacer que los robots realmente 'puedan entrar' en estos escenarios es otra; el primer obstáculo es suficiente para disuadir a la mayoría de las empresas: la certificación antiexplosiva.
En entornos inflamables y explosivos como estaciones de servicio, instalaciones de petróleo y gas, plantas químicas, etc., el robot en sí mismo no puede convertirse en una fuente potencial de ignición. Esto impone requisitos extremadamente estrictos en el diseño del hardware del producto desde el principio. Por ejemplo: a nivel de circuito se debe implementar un diseño de seguridad intrínseca, limitando la energía del circuito para garantizar que incluso en caso de fallo, no sea suficiente para inflamar los gases ambientales; la estructura mecánica debe cumplir con los requisitos de contención de explosiones, soportando una explosión interna sin dañar la carcasa; todos los puntos de conexión deben ser tratados con seguridad mejorada para prevenir riesgos de chispas durante el funcionamiento normal; los componentes clave también deben aislarse mediante encapsulación para prevenir contactos peligrosos, etc.
¿Adónde puede ir la inteligencia corporeizada?
El desafío para el robot en este escenario se centra en la 'continuidad de las operaciones finas'. Después de que el cliente hace el pedido, el robot debe completar más de diez acciones de manera continua: levantar la tapa exterior, desenroscar la tapa interior, descolgar la pistola de gasolina del soporte, apuntar e insertar en la boca del tanque, esperar a que se llene, sacar la pistola, colgarla de nuevo en el soporte, poner la tapa interior, cerrar la tapa exterior. La tolerancia de cada movimiento es de solo unos pocos milímetros; si cualquier paso se atasca, significa que toda la cadena se interrumpe. Además, la posición del tanque de gasolina, la estructura de la tapa, la forma de apertura varían enormemente entre diferentes modelos de automóviles; es imposible que el robot funcione para todos los casos con un programa fijo.
Los puntos de dolor de la inspección en estaciones de instalaciones son completamente diferentes a los de las gasolineras. La estación de servicio pone a prueba las operaciones finas, mientras que la inspección en instalaciones pone a prueba la capacidad integral de 'patrullaje autónomo prolongado + identificación de múltiples anomalías + respuesta inmediata en el lugar'. Los inspectores caminan rutas fijas todos los días; este trabajo es monótono, peligroso y exige un nivel de atención extremadamente alto. La tasa de omisión de una persona aumenta significativamente después de varias horas de inspección continua.
Escenario portuario: Exploración de la colaboración multi-robot
La característica más especial de este escenario es que requiere naturalmente la colaboración de múltiples robots.
Actualmente, la arquitectura de la mayoría de los sistemas de inteligencia corporeizada es del tipo 'línea de ensamblaje': el módulo de visión se encarga de ver, el módulo de lenguaje se encarga de comprender, el módulo de acción se encarga de ejecutar.
Esta arquitectura puede manejar tareas simples de secuencia corta y baja interferencia, pero una vez que se enfrenta a escenarios con decenas de operaciones secuenciales, entornos altamente dinámicos y una tasa de tolerancia a errores extremadamente baja, cualquier pequeña desviación en cualquier paso intermedio se propagará hacia atrás como un efecto dominó. La arquitectura tradicional de línea de ensamblaje casi no puede garantizar la estabilidad de extremo a extremo ante tareas de esta magnitud.
Capacidad predictiva impulsada por Modelos del Mundo
En el escenario de la estación de servicio, la cadena de tareas que enfrenta la inteligencia corporeizada es extremadamente larga: guiar para estacionar, identificar la posición del tanque de gasolina, abrir la tapa exterior, abrir la tapa interior, tomar la pistola, apuntar a la boca del tanque, insertar, repostar, retirar, guardar la pistola, cerrar la tapa interior, cerrar la tapa exterior. Cualquier pequeña desviación en cualquier paso se propagará hacia atrás.
Esta capacidad es especialmente crucial en tareas de secuencia larga. Repostar no es una operación simple de 'agarrar y colocar'; es una cadena completa de acciones con relaciones de causa y efecto. Los Modelos del Mundo dotan a la inteligencia corporeizada de la capacidad prospectiva de 'ver tres pasos y dar uno'.
Usando una metáfora para entenderlo: un conductor experimentado al repostar, sin importar si la tapa del tanque se abre fácilmente o no, siempre tiene claro en su mente el estado final que debe alcanzar, y cada paso intermedio se ajusta en torno a ese estado final. Esto hace que la inteligencia corporeizada pase de una 'ejecución lineal' a un 'alineamiento con el estado final'.
Primero, generar la observación objetivo. Después de recibir la instrucción de la tarea y la imagen actual de la cámara, el sistema primero predice 'cómo debería verse el mundo después de completar la tarea'. Por ejemplo, después de la tarea de repostaje, la pistola de gasolina debería estar guardada y la tapa del tanque debería estar cerrada. Esta 'imagen del estado final' predicha es la observación objetivo; proporciona un punto de anclaje semántico claro para todos los procesos de razonamiento posteriores.
Segundo, sintetizar fotogramas intermedios de transición. Con el objetivo establecido, el sistema luego retrocede para determinar qué estados visuales deberían ocurrir en el medio. Si el punto de partida es 'la tapa del tanque está cerrada' y el punto final es 'la pistola de gasolina está guardada y la tapa del tanque está cerrada', entonces en el medio necesitan aparecer secuencialmente transiciones como 'tapa del tanque abierta', 'pistola de gasolina retirada', 'pistola de gasolina insertada en la boca del tanque', etc. Estos fotogramas de observación intermedios sintetizados proporcionan referencias visuales para la generación de acciones, alineándose paso a paso.
Este mecanismo permite que el robot tenga una imaginación visual completa de todo el proceso de la tarea antes de actuar. La planificación de acciones posteriores se desarrolla en torno a esta 'trayectoria imaginada', reduciendo así significativamente la desviación acumulativa en la ejecución de secuencias largas.
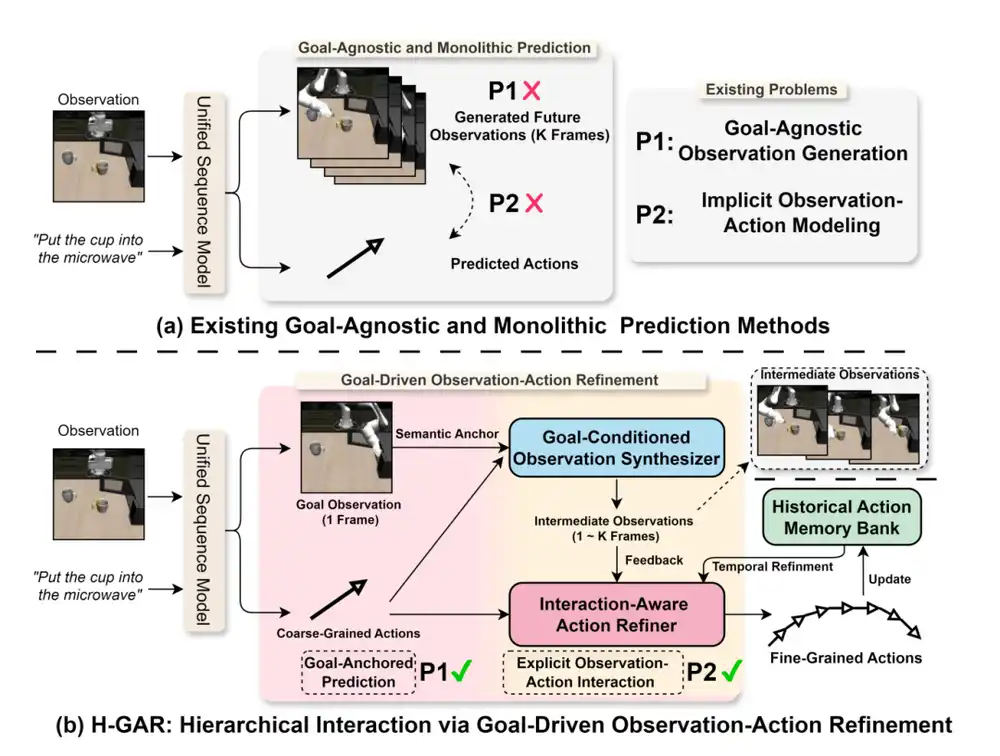
(a) Los métodos existentes suelen adoptar un paradigma de predicción no condicionado por objetivos y de tipo monolítico. (b) H-GAR introduce un sintetizador de observaciones condicionado por objetivos y un optimizador de acciones con percepción de interacción, logrando así una predicción anclada en objetivos y modelando explícitamente la interacción entre observaciones y acciones.
Específicamente, el flujo de trabajo de H-GAR se divide en tres pasos:
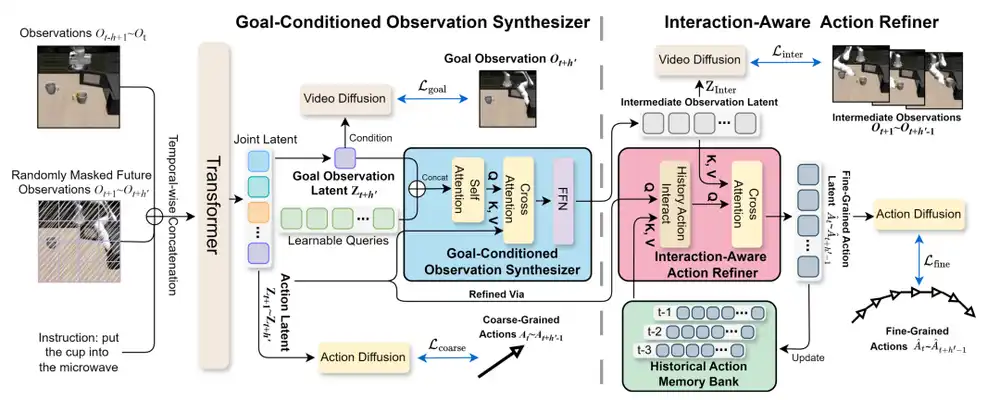
Diagrama de la arquitectura H-GAR
Primer paso: Borrador de acciones de granularidad gruesa. Basándose en imágenes históricas y la instrucción de la tarea, el sistema primero genera un conjunto de secuencias de acciones aproximadas. Estas acciones describen una 'ruta aproximada' desde el estado actual hasta el objetivo, similar al plan aproximado que una persona tiene en mente al repostar: saber aproximadamente qué pasos hacer, es la preparación antes de la ejecución.
Segundo paso: Síntesis de observación condicionada por objetivos (módulo GOS). Después de obtener las acciones de granularidad gruesa, el sistema sintetiza los fotogramas visuales intermedios guiado por la observación objetivo. La clave de este paso es que las imágenes sintetizadas no se generan al azar, sino que están simultáneamente restringidas tanto por el estado final objetivo como por las acciones aproximadas. Esto asegura que los fotogramas de transición intermedios se ajusten tanto a la lógica de las acciones como al objetivo final.
Tercer paso: Refinamiento de acciones con percepción de interacción (módulo IAAR). El último paso actualiza las acciones aproximadas a instrucciones ejecutables detalladas. IAAR obtiene retroalimentación de dos direcciones para refinar las acciones: una es el contexto visual proporcionado por los fotogramas de observación intermedios, alineando las acciones con la escena real; la otra es la memoria de acciones históricas, que registra acciones detalladas ejecutadas previamente, asegurando que las acciones generadas actualmente mantengan la consistencia temporal con la trayectoria histórica. Cuando la memoria excede un umbral de capacidad, el sistema adopta una estrategia de eliminación por similitud, fusionando las acciones adyacentes más similares para mantener la diversidad de la memoria.
Dirección del artículo: https://arxiv.org/pdf/2511.17079
En escenarios reales, los imprevistos son casi la norma. La tapa del tanque podría abrirse en un ángulo incorrecto, el cliente podría haber estacionado en una posición desplazada respecto a lo esperado, o incluso podría haber objetos extraños alrededor de la boca del tanque. Una acción que en el laboratorio tiene éxito 99 de cada 100 veces, en un entorno real al aire libre podría reducir su efectividad en un treinta por ciento.
Epílogo: Unidad de conocimiento y acción
Llevar la inteligencia corporeizada hacia escenarios especiales es algo que requiere un espíritu de largo plazo.
Para ingresar en industrias especiales, el diseño de la estructura mecánica debe considerar la seguridad desde sus cimientos, y se debe tener la capacidad de desarrollar la propia entidad corporeizada. Y para ejecutar tareas en escenarios especiales, el 'cerebro' corporeizado es aún más indispensable. El acoplamiento profundo entre el cerebro y la entidad física ya va más allá de ser un valor añadido; es la condición de entrada.
Cuando la industria de la inteligencia corporeizada se encuentra colectivamente en la encrucijada de la comercialización, aquellos jugadores que primero logren ejecutar el ciclo cerrado de 'cerebro-entidad física-datos' probablemente tomarán la delantera en la competencia que se avecina.
Este artículo proviene del WeChat Official Account: Machine Heart (机器之心) , Editor: Leng Mao, Autor: Aquel que sigue la inteligencia corporeizada, Título original: 'La primera certificación antiexplosiva nacional y el primer esquema mundial de 'Cerebro de Repostaje', ¿cómo lograron conquistar estos dos 'números uno'?'
![Evaluando la caída del 12% del precio de Sonic [S] y por qué podría venir más venta](https://d1x7dwosqaosdj.cloudfront.net/images/2026-06/161e3d66eea4402796d2e6a66d93d453.jpg)