El Manifiesto de los Modelos del Mundo de Fei-Fei Li
"El mundo es todo lo que acaece."
Un siglo después de que Ludwig Wittgenstein escribiera esa frase, la pionera de la IA, Fei-Fei Li, la recupera para abrir un manifiesto técnico. En la era de la IA generativa, donde los modelos de lenguaje dominan, Li señala un punto ciego crucial: las máquinas pueden hablar del mundo, pero desconocen su esencia física. Su blog no busca reclamar la definición de "modelo mundial", sino declarar que el mundo está constituido por leyes físicas y temporales, no por lenguaje.
Para que la IA interactúe con el mundo real, debe trascender la estadística textual y comprender la física. El término "modelo mundial" se ha vuelto ambiguo. Li propone una taxonomía basada en el proceso de decisión de Markov parcialmente observable (POMDP), desglosándolo en tres pilares fundamentales para una inteligencia encarnada:
1. **Renderizador (Renderer):** Busca coherencia visual, generando píxeles realistas. Es el área más comercialmente madura (ej. Sora, modelos de imagen), pero genera apariencias, no estructuras físicamente plausibles.
2. **Simulador (Simulator):** Prioriza la fidelidad a las leyes físicas (masa, gravedad, colisiones). Es crucial para la robótica y la industria, pero está subestimado y es extremadamente costoso de desarrollar con precisión.
3. **Planificador (Planner):** Gestiona la toma de decisiones y las acciones, conectando la percepción con la actuación en entornos complejos.
Li identifica al **simulador como el nexo central**, el puente entre la renderización y la planificación. Empresas como NVIDIA, con Omniverse, lideran esta área, crucial para gemelos digitales y aplicaciones industriales. Sin embargo, persisten grandes desafíos: la escasez de datos 3D con anotaciones físicas y los riesgos de los modelos generativos (ej., geometrías físicamente imposibles).
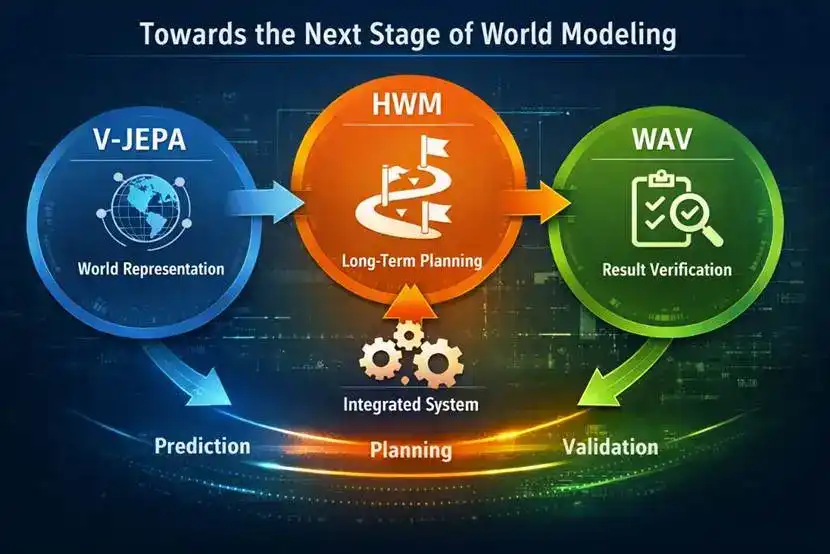
La tendencia positiva es la **convergencia hacia un modelo mundial unificado**, donde los límites entre renderizado, simulación y planificación se difuminen. Este modelo base único podría alternar entre modos visuales y estados físicos, siendo interactivo y adaptable.
En última instancia, el desarrollo de modelos mundiales representa la búsqueda de la **inteligencia espacial**, complementando la inteligencia lingüística. No se trata solo de potencia de cálculo, sino de definir el estándar digital del mundo físico. Es un paso crucial, aunque aún lejano, hacia una IA capaz de entender e interactuar genuinamente con la realidad. Como señala Yann LeCun, incluso alcanzar el nivel de inteligencia de un cachorro podría llevar aún una década.
marsbit06/09 00:42