原文标题:Crypto trader gets sandwich attacked in stablecoin swap, loses $ 215 K
原文作者:Brayden Lindrea,Cointelegraph 作者
原文编译:ChatGPT
编者按:本文报道了一起发生在加密货币交易中的三明治攻击事件,一名交易员在进行稳定币兑换时损失了超过 21.5 万美元。文章详细描述了攻击的过程,包括 MEV 机器人如何通过前置交易获利,并探讨了可能的洗钱行为。同时,文章也提到了 Uniswap 平台为防止此类攻击所采取的保护措施,并对最初的批评进行了澄清。
以下为原文内容(为便于阅读理解,原内容有所整编):
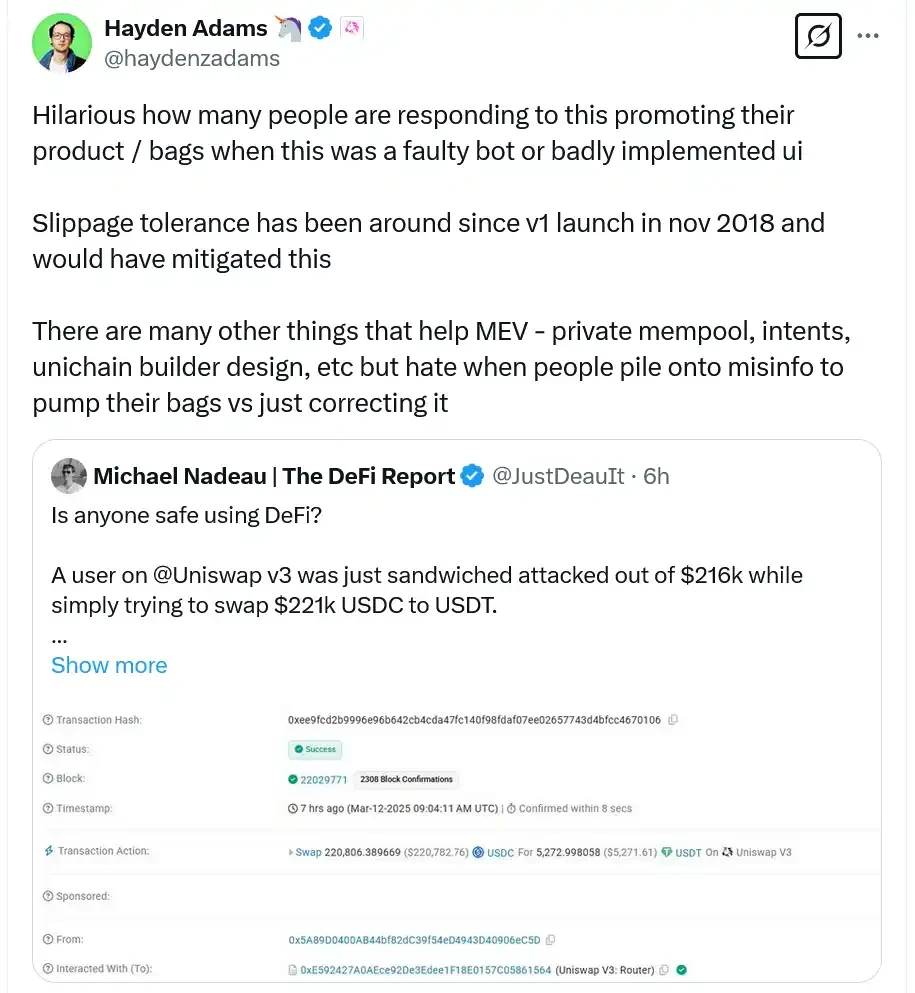
3 月 12 日,一名加密交易员在进行一笔 220, 764 美元的稳定币转账时,成为了三明治攻击的受害者,几乎损失了其价值的 98% ,高达 21.5 万美元,这些价值被 MEV 机器人获取。
价值 220, 764 美元的 USDC 稳定币在 8 秒内被兑换为 5, 271 美元的 Tether USDT,因为 MEV 机器人成功前置交易,从中获利超过 215, 500 美元。
以太坊区块浏览器的数据显示,这起 MEV 攻击发生在去中心化交易所 Uniswap v3 的 USDC-USDT 流动性池中,该池锁定了价值 1980 万美元的资产。
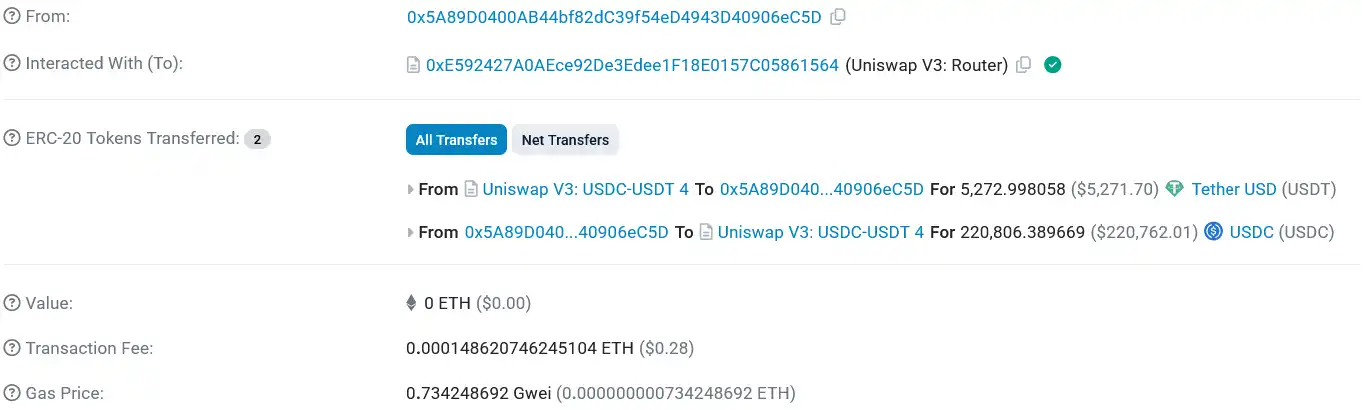
三明治攻击交易的详情 来源:Etherscan
根据 The DeFi Report 的创始人 Michael Nadeau 的说法,MEV 机器人通过将所有的 USDC 流动性从 Uniswap v3 的 USDC-USDT 池中换出,然后在交易执行后再将其放回,从而前置交易。
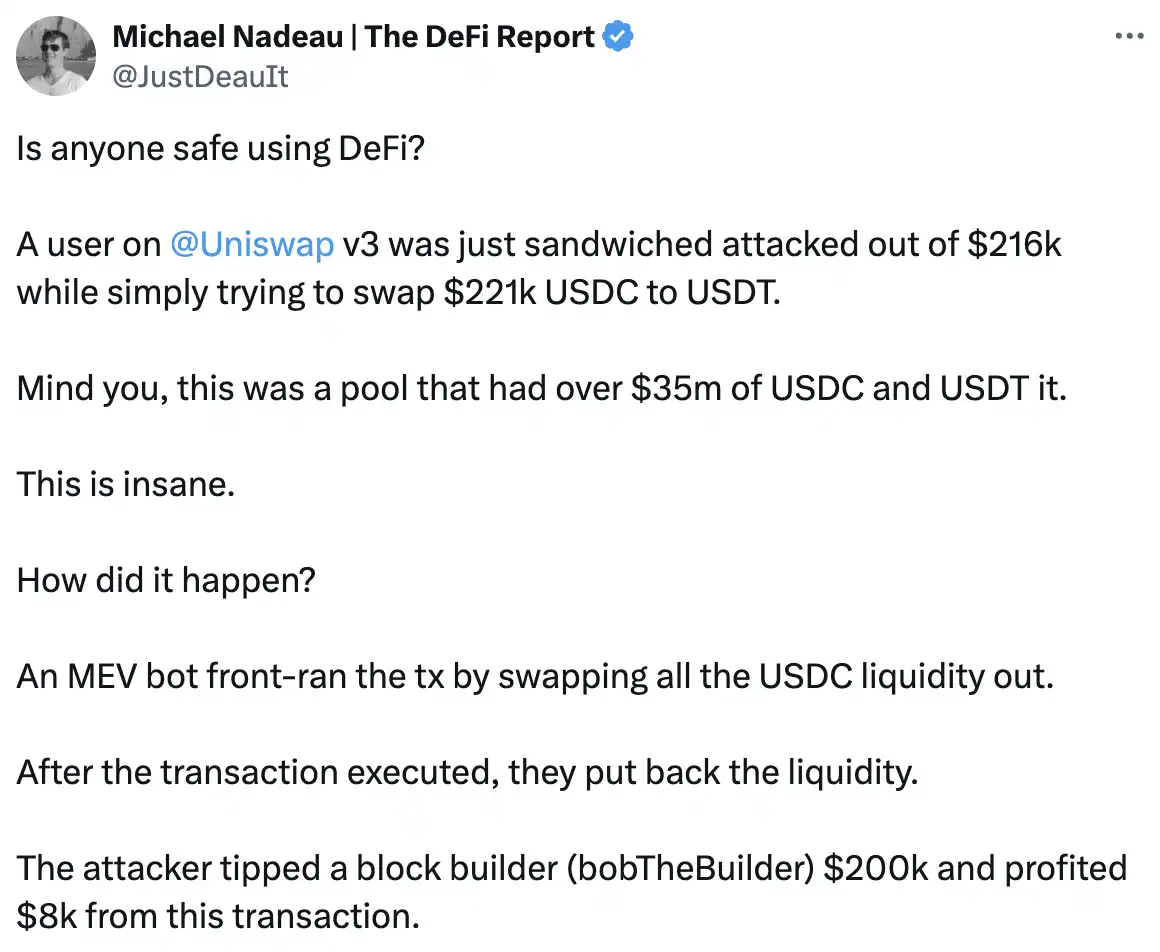
Nadeau 表示,攻击者从 220,764 美元的交易中向以太坊区块构建者「bob-the-builder.eth」支付了 20 万美元的小费,并自己获利 8000 美元。
DeFi 研究员「DeFiac」推测,使用不同钱包的同一交易员可能总共遭遇了六次三明治攻击,他们引用了「内部工具」作为依据。他们指出,所有资金在存入 Uniswap 之前都来自借贷协议 Aave。
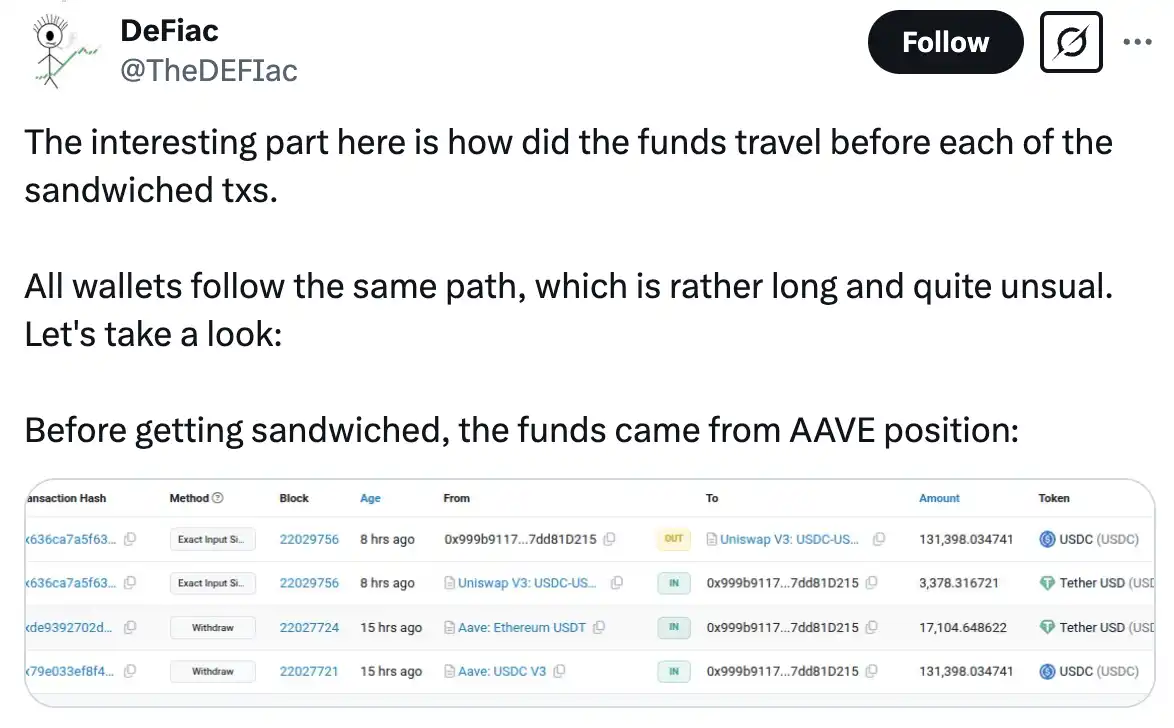
其中两个钱包在 3 月 12 日 UTC 时间上午 9 点左右成为了 MEV 机器人三明治攻击的受害者。以太坊钱包地址「0xDDe…42a6D」和「0x999…1D215」在三到四分钟前的交易中分别被三明治攻击,损失了 138,838 美元和 128,003 美元。
这两个交易员在 Uniswap v3 的流动性池中进行了与进行 220,762 美元转账的交易员相同的兑换。
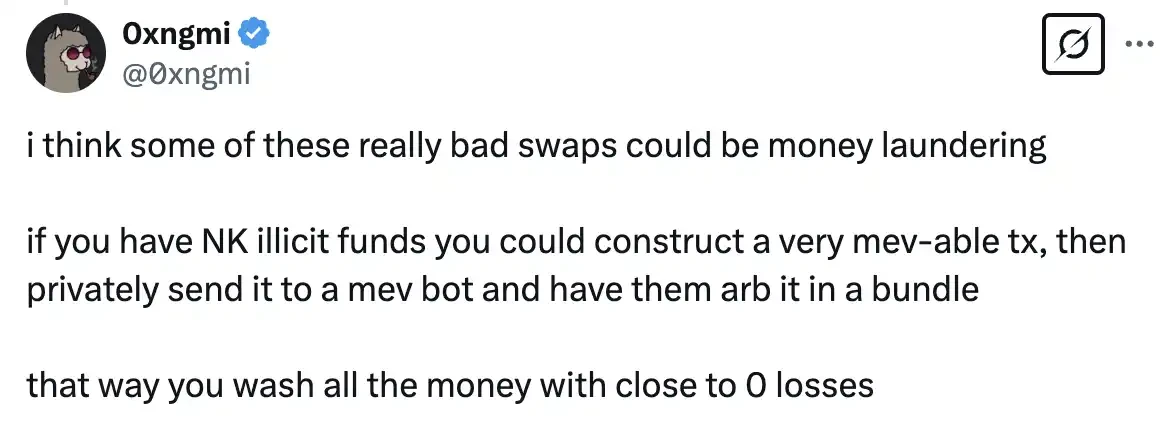
有人推测这些交易可能与洗钱有关。
加密数据仪表板 DefiLlama 的创始人 0xngmi 表示:「如果你有 NK 非法资金,你可以构建一个非常容易被 MEV 攻击的交易,然后私下发送给一个 MEV 机器人,并让他们在一个捆绑包中进行套利。」「这样你就可以以接近零的损失洗掉所有的钱。」
虽然 Nadeau 一开始批评 Uniswap,但他后来承认这些交易并非来自 Uniswap 的前端,Uniswap 的前端具有 MEV 保护和默认滑点设置。
在 Uniswap CEO Hayden Adams 和其他人澄清了 Uniswap 为防止三明治攻击所采取的保护措施后,Nadeau 收回了这些批评。