Tại Diễn đàn Davos, Jensen Huang thực sự đã nói gì?
Bề ngoài, ông ấy đang quảng bá robot, nhưng thực chất, ông ấy đang thực hiện một cuộc 'tự cách mạng' táo bạo. Ông ấy đã kết thúc thời đại cũ 'chồng card đồ họa' chỉ bằng một bài phát biểu, nhưng lại vô tình mở ra một tấm vé vào cửa ngàn năm có một cho làn đường Crypto?
Hôm qua, tại Diễn đàn Davos, ông Huang chỉ ra rằng tầng ứng dụng AI đang bùng nổ, nhu cầu về năng lực tính toán sẽ chuyển hoàn toàn từ 'phía đào tạo' sang 'phía suy luận' và 'phía Physical AI (AI vật lý)'.
Điều này thật thú vị.
Là người chiến thắng lớn nhất trong 'cuộc chạy đua vũ trang năng lực tính toán' thời đại AI 1.0, giờ đây NVIDIA chủ động kêu gọi chuyển hướng sang 'phía suy luận' và 'Physical AI', thực chất đang truyền đi một tín hiệu rất rõ ràng: thời đại 'sức mạnh tạo nên kỳ tích' dựa vào việc chồng card để đào tạo mô hình lớn đã qua, từ nay về sau cuộc cạnh tranh AI sẽ xoay quanh việc ứng dụng thực tế, 'ứng dụng là vua'.
Nói cách khác, Physical AI là chặng đường tiếp theo của Generative AI.
Bởi vì LLM đã đọc hết tất cả dữ liệu mà con người đã tích lũy trên internet trong mấy chục năm, nhưng nó vẫn không hiểu cách vặn nắp chai như một con người. Physical AI chính là để giải quyết vấn đề 'hành động đi đôi với nhận thức' bên ngoài trí thông minh của AI.
Bởi vì, AI vật lý không thể phụ thuộc vào 'phản xạ chậm' của máy chủ đám mây từ xa, logic rất đơn giản: nếu ChatGPT tạo ra văn bản chậm một giây, bạn chỉ cảm thấy bị giật, nhưng nếu một robot hai chân bị chậm một giây do độ trễ mạng, nó có thể sẽ ngã xuống cầu thang.
Tuy nhiên, Physical AI thoạt nhìn là sự tiếp nối của AI生成式 (Generative AI), nhưng thực tế đang đối mặt với ba vấn đề mới hoàn toàn khác biệt:
1) Trí thông minh không gian: Cho AI khả năng hiểu biết về thế giới ba chiều.
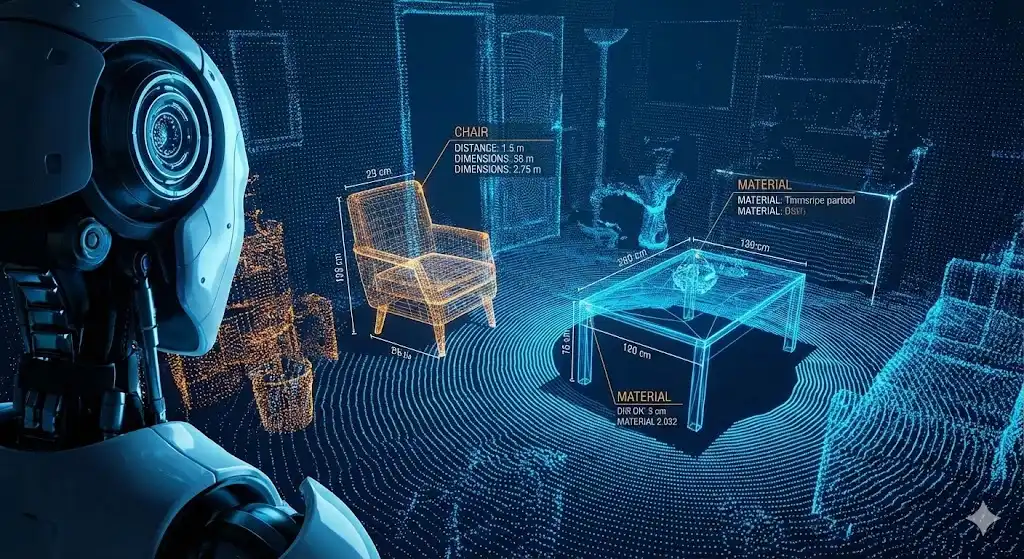
Giáo sư Fei-Fei Li từng đề xuất, trí thông minh không gian là ngôi sao Bắc Đẩu tiếp theo trong quá trình tiến hóa của AI. Robot muốn động, trước tiên phải 'nhìn thấu' môi trường. Đây không chỉ là nhận ra 'đây là một cái ghế', mà là phải hiểu 'vị trí, cấu trúc của cái ghế này trong không gian ba chiều và tôi nên dùng bao nhiêu lực để di chuyển nó'.
Điều này đòi hỏi một lượng dữ liệu môi trường 3D khổng lồ, theo thời gian thực, bao phủ mọi ngóc ngách trong nhà và ngoài trời;
2) Bãi tập ảo: Để AI được huấn luyện thử và sai trong thế giới mô phỏng.
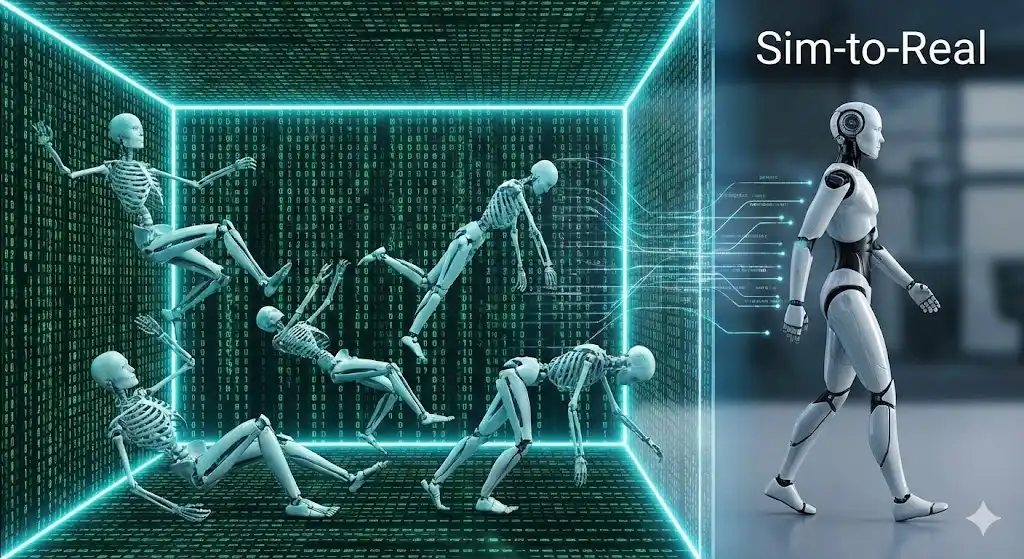
Omniverse mà ông Huang đề cập thực chất là một loại 'bãi tập ảo'. Trước khi bước vào thế giới vật lý thực, robot cần được huấn luyện 'ngã một vạn lần' trong môi trường ảo để học cách đi, quá trình này gọi là Sim-to-Real, tức từ mô phỏng đến hiện thực. Nếu để robot trực tiếp thử sai trong thực tế, chi phí hao mòn phần cứng sẽ là một con số thiên văn khủng khiếp.
Quá trình này, yêu cầu về khả năng mô phỏng động lực học và thông lượng tính toán render là theo cấp số nhân;
3) Da điện tử: 'Dữ liệu xúc giác' - một mỏ vàng dữ liệu chờ được khai thác.
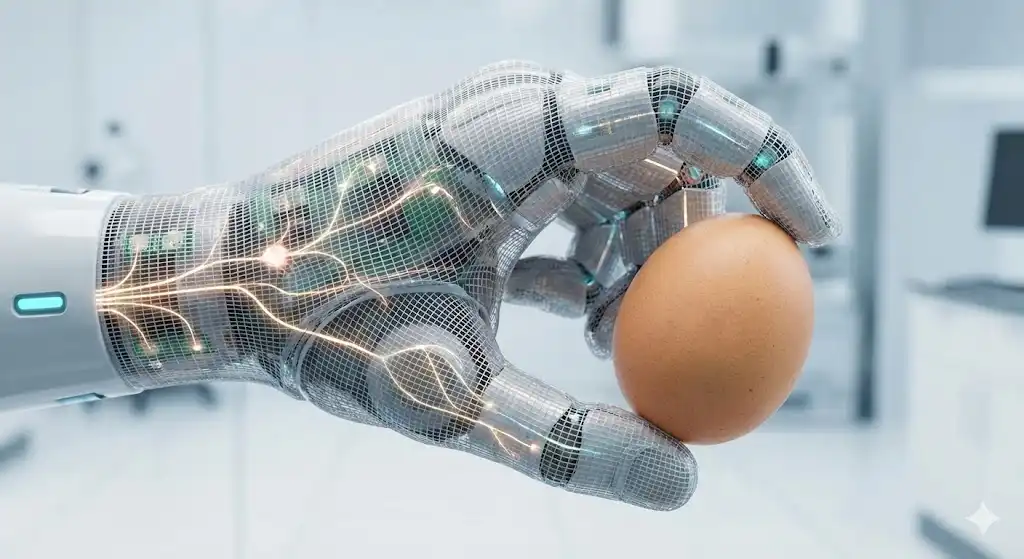
Để Physical AI có được 'cảm giác tay', nó cần da điện tử để cảm nhận nhiệt độ, áp lực, chất liệu. Những 'dữ liệu xúc giác' này là tài sản hoàn toàn mới chưa từng được thu thập với quy mô lớn trước đây. Điều này có thể cần đến việc thu thập cảm biến quy mô lớn. Tại CES, công ty Ensuring đã trưng bày 'làn da sản xuất hàng loạt' - chỉ trên một bàn tay chi chít đã tích hợp 1.956 cảm biến, vì vậy mới có hiệu ứng thần kỳ như robot bóc trứng.
Những 'dữ liệu xúc giác' này là tài sản hoàn toàn mới chưa từng được thu thập với quy mô lớn trước đây.
Sau khi xem xong những điều này, bạn chắc chắn sẽ cảm thấy, sự xuất hiện của luận điệu Physical AI đã mang lại cơ hội nổi lên rất lớn cho nhiều thiết bị đeo được và robot hình người, hãy nhớ rằng, chỉ vài năm trước những thứ này về cơ bản đều bị chê là 'đồ chơi cỡ lớn'.
Thực ra tôi muốn nói, trong bản đồ hoàn toàn mới của Physical AI, làn đường Crypto thực sự cũng có cơ hội bổ sung vị trí sinh thái tuyệt vời. Tôi xin đưa ra vài ví dụ:
1. Các gã khổng lồ AI có thể cử xe quét cảnh đường phố quét mọi con phố chính trên thế giới, nhưng lại không thể thu thập được những ngóc ngách trong khu phố, trong khu dân cư, tầng hầm. Bằng cách sử dụng Token incentive từ thiết bị mạng DePIN, huy động người dùng toàn cầu sử dụng thiết bị di động để bổ sung những dữ liệu này, thì có khả năng hoàn thành việc bổ sung vị trí;
2. Như đã nói ở trên, robot không thể phụ thuộc vào năng lực tính toán đám mây, nhưng để sử dụng quy mô lớn trong ngắn hạn năng lực tính toán biên và render phân tán, đặc biệt là để hoàn thành nhiều dữ liệu từ mô phỏng đến thực tế. Sử dụng mạng lưới tính toán phân tán, tập hợp các phần cứng cấp tiêu dùng nhàn rỗi lại, tiến hành phân phối và điều phối, không phải là có thể sử dụng được rồi sao;
3. 'Dữ liệu xúc giác', ngoài việc ứng dụng cảm biến quy mô lớn, nghe tên đã biết sẽ cực kỳ riêng tư, làm thế nào để điều phối đại chúng chia sẻ những dữ liệu liên quan đến riêng tư này cho các gã khổng lồ AI, con đường khả thi là để người đóng góp dữ liệu có được xác quyền dữ liệu và chia lợi nhuận.
Tóm lại:
Physical AI là hiệp hai của làn đường web2 AI mà ông Huang đã kêu gọi, vậy đối với các phân khúc web3 AI + Crypto như DePIN, DeAI, DeData thì sao? Bạn nghĩ thế nào?