Lĩnh vực trí tuệ thể hiện đón nhận bước tiến mang tính bước ngoặt. AutoNomy hôm nay chính thức công bố mở nguồn toàn bộ mô hình nền tảng vận hành thể hiện robot đầu tiên trên thế giới dựa trên kiến trúc thống nhất ABot-M0. Trọng tâm cốt lõi của mô hình này nhằm hiện thực hóa "một bộ não đa năng thích ứng với nhiều hình thái robot", hướng tới phá vỡ rào cản giữa các phần cứng không đồng nhất, đẩy nhanh tốc độ phát triển của trí tuệ thể hiện từ phòng thí nghiệm đến các ứng dụng công nghiệp và gia đình.
Hiệu suất và Công nghệ cốt lõi
ABot-M0 thể hiện hiệu suất vượt trội trong nhiều bài kiểm tra chuẩn ngành. Dữ liệu cho thấy, tỷ lệ hoàn thành nhiệm vụ của mô hình này trên chuẩn Libero-Plus đạt tới 80.5%, tăng gần 30% so với giải pháp tiêu biểu trước đó là Pi0. Hơn nữa, nó đã thiết lập kỷ lục SOTA (state-of-the-art, tiên tiến nhất ngành) mới trong các bài kiểm tra như Libero và RoboCasa.
Mở nguồn toàn bộ trên ba phương diện
Để giải quyết các điểm khó lâu nay trong lĩnh vực trí tuệ thể hiện là "ốc đảo dữ liệu" và "triển khai phức tạp", AutoNomy lần này mở nguồn bao gồm ba phương diện: dữ liệu nền tảng, thuật toán cốt lõi và mô hình tiền huấn luyện:
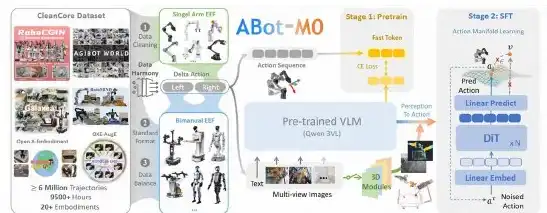
Về dữ liệu: Mở nguồn bộ dữ liệu robot đa năng có quy mô lớn nhất hiện nay UniACT. Bộ dữ liệu này tích hợp hơn 6 triệu đường chuyển động thao tác thực tế, và đi kèm cung cấp quy trình xử lý đầy đủ từ dữ liệu không đồng nhất đến dữ liệu huấn luyện tiêu chuẩn hóa.
Về thuật toán: Đồng thời công khai kiến trúc mô hình và framework huấn luyện, điểm nhấn cốt lõi bao gồm thuật toán Học đa tạp hành động (AML) sáng tạo của AutoNomy và Kiến trúc cảm nhận hai luồng, trao cho robot khả năng hiểu không gian và thực thi hành động xuất sắc.
Về mô hình: Cung cấp mô hình tiền huấn luyện end-to-end và đầy đủ toolchain. Các nhà phát triển có thể "sử dụng ngay", không cần xây dựng framework từ đầu, giảm đáng kể ngưỡng thích ứng cho robot hợp tác công nghiệp hoặc robot dịch vụ gia đình.
Tác động đến ngành
Trưởng nhóm kỹ thuật ABot-M0 của AutoNomy cho biết, trí tuệ thể hiện đa năng thực sự cần sự mài giũa chung của các nhà phát triển toàn cầu. Việc mở nguồn ABot-M0 không chỉ là chia sẻ công nghệ, mà hơn hết là hy vọng xây dựng cầu nối kết nối nghiên cứu học thuật và ứng dụng công nghiệp, để mỗi robot với hình thái khác nhau đều có thể sở hữu một "bộ não" thông minh, đáng tin cậy và đa năng.