Unitree a été choisi par Nvidia, mais Nvidia n'a pas choisi les mains d'Unitree.
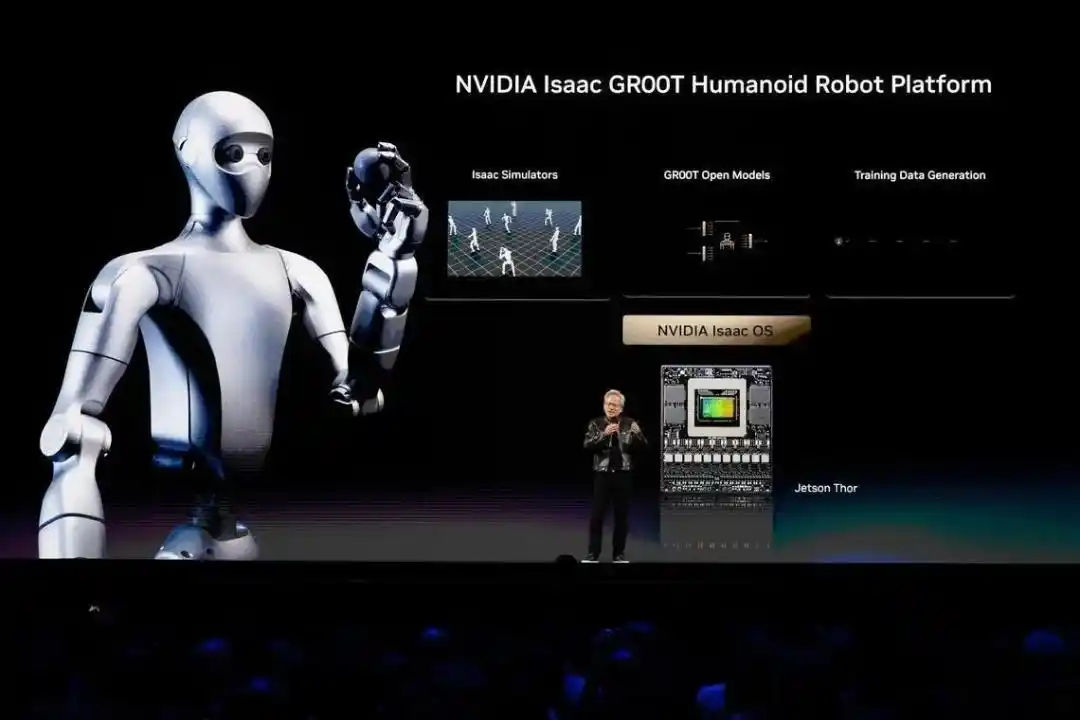
Alors que Unitree Technologies franchissait l'étape d'approbation pour son introduction en bourse sur le STAR Market, son robot humanoïde H2 Plus a également été désigné par Nvidia comme le corps de référence pour le robot humanoïde NVIDIA Isaac GR00T publié par Nvidia.
Cette alliance entre géants a fait bouillonner les cercles de l'intelligence incarnée et de l'IA. Après tout, la position dominante de Nvidia dans le secteur n'est plus à démontrer, et Unitree, grâce aux excellentes capacités de contrôle des mouvements de ses robots, fait partie du premier groupe mondial des robots humanoïdes.
Mais ce qui est vraiment surprenant, c'est que ce robot de référence n'utilise pas les mains habiles d'Unitree, mais les a remplacées par celles de Sharpa Wave.
Sharpa est une entreprise de mains habiles fondée il y a seulement deux ans, basée à Singapour, dont l'équipe principale provient de l'équipe de mains habiles constituée par Hesai Technology en 2024. Elle n'a pas la même notoriété qu'Unitree, et n'apparaît pas aussi fréquemment dans les actualités de financement que Lingxinqiaoshou ou Critical Point.
Cette année, lors du Gala du Nouvel An chinois, les mains habiles Sharpa sont également apparues dans le spectacle "Ma Soirée la Plus Mémorable" de Shen Teng et Ma Li. Mais dans le sous-secteur des mains habiles, elle reste très discrète.

Pourtant, aujourd'hui, elle se trouve aux côtés d'Unitree à la table de jeu de l'intelligence incarnée de Nvidia.
L'un est responsable du corps, l'autre des mains.
Seulement, comment une entreprise de mains habiles fondée il y a seulement deux ans a-t-elle pu attirer l'attention de Nvidia ?
Les mains d'Unitree, cette fois, ont perdu
En réalité, Unitree a bel et bien ses propres mains habiles.
D'après sa gamme de produits publique, Unitree a déjà lancé la série Dex de mains habiles, avec des solutions allant de trois doigts à cinq doigts, dont les performances ne sont pas mauvaises.
Mais ce que Nvidia voulait cette fois, n'était peut-être pas seulement "une main qui peut être montée sur un robot humanoïde".
D'un point de vue technique, les mains habiles de Sharpa ont effectivement des points forts.
En 2024, Hesai Technology a constitué une équipe dédiée aux mains habiles, l'ancêtre de Sharpa. Passer du LiDAR de Hesai Technology aux mains habiles, Sharpa semble faire un "crossover".
Pour beaucoup, la conduite autonome et la robotique sont deux industries complètement différentes.
Mais pour une entreprise comme Hesai, il existe en réalité des compétences techniques communes entre les deux.
La conduite autonome nécessite que la machine perçoive, comprenne et prenne des décisions en temps réel dans des environnements complexes, ce qui impose des exigences élevées en matière de précision des capteurs, de fiabilité du système et de capacité d'ingénierie. Lorsque les robots entrent dans le monde réel pour exécuter des tâches, ils rencontrent des problèmes similaires.
La différence est que la conduite autonome résout la question de "comment la voiture voit le monde", tandis que les mains habiles résolvent celle de "comment le robot interagit avec le monde".
C'est précisément pour cette raison que Sharpa a transféré ses compétences passées vers un autre secteur. Peu après sa création, Sharpa a lancé son produit phare : la main habile Sharpa Wave.

Dans le domaine des mains habiles, une contradiction de longue date est que : la performance et la production de masse sont souvent difficiles à concilier.
Certains produits adoptent des schémas sous-actionnés, contrôlant plusieurs articulations avec peu de moteurs, ce qui réduit les coûts mais limite la flexibilité et la précision de contrôle ; d'autres poursuivent des capacités proches de la main humaine, avec une structure complexe et un prix élevé, rendant difficile une mise en œuvre à grande échelle.
Sharpa a choisi une voie intermédiaire.
La Sharpa Wave possède 22 degrés de liberté (DoF) actifs, et ses dimensions globales sont proches d'un rapport 1:1 avec une paume humaine. Pour obtenir une plus grande précision de contrôle, elle adopte une architecture de transmission à entraînement direct, améliorant la vitesse de réponse des articulations et les capacités de contrôle des mouvements.
Mais au-delà du nombre de DoF, l'élément central est l'investissement de Sharpa dans le système tactile.
Dans l'industrie des robots humanoïdes, une tendance de plus en plus claire est que : la seule vision ne suffit plus à répondre aux besoins d'opérations complexes.
Sharpa a développé un système tactile nommé Dynamic Tactile Array (DTA). À l'intérieur de chaque bout de doigt est intégrée une caméra miniature avec plus de 1000 unités de perception tactile, permettant au robot de percevoir les changements de pression, d'identifier les textures, le glissement et l'état de contact, obtenant ainsi une "rétroaction tactile" similaire à celle du bout des doigts humains.
Selon les données divulguées par Sharpa, la précision de sa perception tactile peut atteindre l'ordre de 0.005N, avec une fréquence de rafraîchissement de 180Hz ; la fréquence de contrôle de la main entière atteint 500Hz, et la force de sortie d'un seul bout de doigt dépasse 20N.
Tous ces paramètres visent le même objectif : permettre au robot de posséder réellement la capacité de manipuler des objets du monde réel.
Ce n'est pas tout à fait la même orientation que celle des mains habiles d'Unitree.
La série Dex d'Unitree s'intègre davantage à son propre écosystème de robot complet. Que ce soit la solution à trois ou cinq doigts, l'accent est mis sur la saisie et la manipulation par le robot au sein de son propre corps, de son contrôle du mouvement et de son environnement de développement.
Autrement dit, ce n'est pas que les mains d'Unitree soient mauvaises, c'est juste que pour ce robot de référence de Nvidia, les mains de Sharpa correspondent mieux aux exigences.
Ainsi, la valeur de Sharpa Wave réside dans le fait de transformer l'acte d'"interagir avec le monde" en un point d'entrée de données que le robot peut percevoir, analyser en retour et utiliser pour son entraînement.
Mais les paramètres restent des paramètres. Pour prouver qu'une main habile possède réellement la capacité d'"interagir avec le monde", il faut le démontrer dans des tâches concrètes.
Et la raison pour laquelle Sharpa a pu attirer l'attention du marché, c'est précisément parce qu'elle a transformé ces paramètres en une série de démonstrations d'opérations qui impressionnent ses pairs.
Des mains habiles sexy, qui distribuent des cartes en ligne
Lors du salon des produits de l'IROS 2025 (Conférence internationale sur les robots et systèmes intelligents), une démonstration de Sharpa a marqué les esprits de l'industrie : une main habile Sharpa a tiré une carte d'un jeu de cartes tenu par une autre main et l'a placée sur une table.

La raison de cette forte impression réside dans le fait que l'action de distribuer des cartes impose des exigences extrêmement élevées en matière de précision du contrôle de force de la main habile, ainsi que de capacité de prédiction du glissement et de l'extraction des cartes.
De plus, Sharpa a publié une série de vidéos de démonstration : écaler un œuf, peler une pomme, distribuer des cartes, plier un moulinet en papier, et même assembler un boîtier d'ordinateur, y compris insérer avec précision une carte graphique et serrer les vis de fixation.
Ces tâches peuvent sembler être des démos amusantes, mais pour l'industrie robotique, elles représentent des niveaux de difficulté technique complètement différents. Car saisir un objet n'est pas difficile ; ce qui est vraiment difficile, c'est de contrôler le processus de contact.
Un robot peut facilement ramasser un œuf, mais ne saura pas nécessairement quand augmenter ou diminuer la force ; il peut identifier une carte à jouer, mais aura du mal à garantir que le papier ne glissera pas ou ne se déformera pas.
Et bon nombre des capacités démontrées par Sharpa pointent essentiellement vers la même question : le robot peut-il, comme un humain, ajuster constamment ses mouvements grâce à la rétroaction tactile ?
C'est à ce moment-là que le système tactile DTA entre en jeu.
Lorsque le robot entre en contact avec un objet, le bout des doigts peut percevoir en temps réel les changements de pression, l'état de friction et la tendance au glissement de l'objet, et renvoyer ces informations au système de contrôle pour des ajustements dynamiques. Les objets fragiles ou mous comme les œufs, le papier, les fruits, sont précisément ceux qui mettent le plus en valeur la valeur de ce système.
Parallèlement, Sharpa ne se contente pas d'être un fournisseur de mains habiles. En 2026, la société a officiellement lancé son premier robot humanoïde complet : le Sharpa North.
Sur le site du CES 2026, le North a réalisé des démonstrations comme jouer au ping-pong, prendre des photos avec un bâton à selfie, distribuer des cartes. Mais la plus représentative fut une tâche d'assemblage autonome d'un moulinet en papier, impliquant plus de 30 étapes.
De l'identification des pièces et de la saisie des matériaux, au pliage, à l'assemblage et à la finalisation, l'ensemble du processus a duré plusieurs minutes, impliquant de nombreuses opérations de coordination bimanuelle et de planification d'actions séquentielles. Cela signifie que le robot Sharpa possède la capacité d'accomplir des tâches longues, séquentielles et à multiples étapes.
Des mains habiles au robot humanoïde, du fournisseur de matériel au développeur de système full-stack, la trajectoire de Sharpa devient de plus en plus claire :
Elle ne se contente pas d'être un composant pour robots. Ce qu'elle veut vraiment, c'est faire partie de la plateforme de l'intelligence incarnée de nouvelle génération.
Et la plateforme, c'est précisément le mot-clé de ce robot de référence de Nvidia.
Si les démonstrations précédentes prouvent que la main Sharpa peut effectuer des opérations complexes, la question plus cruciale qui suit est : qu'est-ce qu'une telle main peut apporter à Nvidia ?
Les concurrents se bousculent pour renverser la table
Pour Sharpa, être choisi par Nvidia est bien sûr un moment charnière.
Mais le point clé est que dans ce robot de référence, Sharpa occupe une position assez stratégique.
Car en créant un "robot de référence", Nvidia veut construire une base de développement réutilisable pour l'industrie de l'intelligence incarnée, permettant aux développeurs, instituts de recherche et entreprises robotiques de pouvoir s'entraîner, valider et développer autour de cette solution.
Dans cette solution, Unitree fournit le corps. Grâce à ses capacités de contrôle des mouvements, Unitree résout la question de savoir comment le robot se lève, marche et bouge.
Sharpa complète le tableau en répondant à la question : une fois que le robot est devant un objet, comment tend-il réellement la main pour travailler.
Mais pour Nvidia, ce n'est pas tout.
Plus important encore, les produits de Sharpa ont été intégrés à Isaac Lab. C'est le cadre de simulation et d'entraînement open source le plus central de l'écosystème robotique de Nvidia.
Dans l'étape de téléopération, un opérateur humain peut contrôler la main habile à 22 DoF via un gant de données, en mappant en temps réel les mouvements de la main en actions articulaires du robot ; ces actions sont ensuite enregistrées pour devenir des données pour l'apprentissage par imitation et l'entraînement de stratégies, se transformant en échantillons qui pourront être entraînés, réutilisés et étendus par la suite.
C'est précisément pour cette raison que Sharpa n'a pas obtenu une simple place de fournisseur de matériel. Elle s'est insérée dans l'ensemble du processus de Nvidia, de la collecte par téléopération, à la simulation et l'entraînement, en passant par l'évaluation des stratégies jusqu'au déploiement réel. C'est là la valeur centrale de sa collaboration avec Nvidia.
Bien sûr, être sélectionné par Nvidia ne signifie pas que Sharpa a déjà verrouillé sa victoire à l'avance, car le secteur des mains habiles évolue très vite.
Au cours de l'année écoulée, les capitaux ont presque couru après cette "main" : des entreprises comme Lingxinqiaoshou, Critical Point, Yin Shi Robot, OY Technology, Paxini Perception, etc., accélèrent toutes leurs itérations autour de la haute liberté de mouvement, de la rétroaction tactile, de la précision du contrôle de force et des capacités de production de masse.
Certaines rivalisent en termes de vitesse de financement et de mise sur le marché des produits.
Par exemple, Lingxinqiaoshou a réalisé plusieurs tours de financement successifs depuis 2025, et après son tour B+ en 2026, sa valorisation aurait atteint 3 milliards de dollars, avec un objectif de valorisation pour le prochain tour de financement montant jusqu'à 6 milliards de dollars ; Yin Shi Robot a également complété des tours de financement C1 et C2 de plusieurs centaines de millions de yuans en 2026, continuant à investir dans la R&D des technologies de manipulation habile, l'innovation des composants clés et les capacités de livraison.
D'autres rivalisent sur le tactile.
La gamme de produits de Paxini Perception couvre déjà les capteurs tactiles multidimensionnels, la main habile tactile DexH, le robot humanoïde TORA, et a complété un tour de financement série B de plus de 1 milliard de yuans en mars 2026.
La nouvelle génération de mains habiles d'OY Technology met également en avant des points forts comme les capteurs tactiles à matrice haute densité, une capacité de perception de pression de 0.1N à 25N.
Cela signifie qu'aujourd'hui, ce sont 22 DoF, le système tactile DTA et le design de référence Nvidia, mais demain, de nouvelles mains pourraient émerger avec des coûts plus bas, une stabilité supérieure ou un cycle de données plus fort.
Mais au moins à cet instant, Nvidia a, par sa décision, donné un jugement :
Lorsque l'industrie commence à passer de "qui peut faire marcher le robot" à "qui peut faire travailler le robot", une paire de mains suffisamment intelligentes est devenue aussi importante qu'une paire de jambes.
Cet article provient du compte WeChat "Plan des caractères bleus", auteur : Chester