Le domaine de l'intelligence incarnée connaît une avancée majeure. AutoNavi a officiellement annoncé aujourd'hui l'ouverture en source intégrale du premier modèle de base opérationnel pour robots incarnés au monde basé sur une architecture unifiée, ABot-M0. Ce modèle a pour objectif principal de réaliser "un cerveau universel adaptable à diverses morphologies de robots", visant à briser les barrières entre les matériels hétérogènes et à accélérer le passage de l'intelligence incarnée du laboratoire aux scénarios industriels et domestiques.
Technologie clé et performances
ABot-M0 a démontré des performances exceptionnelles dans plusieurs tests de référence de l'industrie. Les données montrent que le modèle atteint un taux de réussite de 80,5 % sur le benchmark Libero-Plus, soit une amélioration de près de 30 % par rapport à la solution de référence précédente, Pi0. De plus, il a établi de nouveaux records SOTA (state-of-the-art) dans des tests comme Libero et RoboCasa.
Ouverture en source intégrale sur trois dimensions
Pour résoudre les problèmes de longue date de "silos de données" et de "difficultés de déploiement" dans le domaine de l'intelligence incarnée, l'ouverture d'AutoNavi couvre trois dimensions : les données sous-jacentes, les algorithmes clés et les modèles pré-entraînés :
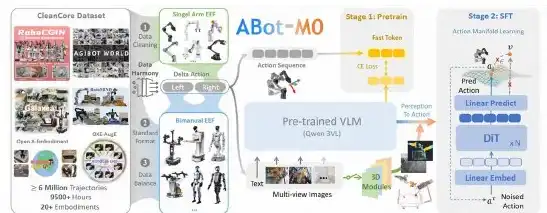
Niveau des données : Ouverture du plus grand ensemble de données universel pour robots, UniACT. Cet ensemble intègre plus de 6 millions de trajectoires opérationnelles réelles et fournit un pipeline complet de traitement des données hétérogènes aux données d'entraînement standardisées.
Niveau des algorithmes : Publication simultanée de l'architecture du modèle et du cadre d'entraînement. Les points forts incluent l'algorithme innovant d'apprentissage de variété d'actions (AML - Action Manifold Learning) et l'architecture de perception à double flux d'AutoNavi, dotant les robots de capacités exceptionnelles de compréhension spatiale et d'exécution d'actions.
Niveau des modèles : Fourniture de modèles pré-entraînés de bout en bout et d'une chaîne d'outils complète. Les développeurs peuvent les utiliser "prêts à l'emploi", sans avoir à construire un framework à partir de zéro, réduisant ainsi considérablement le seuil d'adaptation aux robots collaborateurs industriels ou aux robots domestiques.
Impact sur l'industrie
Le responsable technique d'ABot-M0 chez AutoNavi a déclaré qu'une véritable intelligence incarnée universelle nécessite la collaboration des développeurs du monde entier. L'ouverture d'ABot-M0 n'est pas seulement un partage technologique, mais vise également à construire un pont reliant la recherche académique et les applications industrielles, afin que chaque robot, quelle que soit sa morphologie, puisse posséder un "cerveau" intelligent, fiable et universel.