The field of embodied intelligence has reached a milestone. Amap today officially announced the full open-source release of the world's first unified architecture-based robot operation base model ABot-M0. The core positioning of this model is to achieve "one universal brain adaptable to various forms of robots," aiming to break down barriers between heterogeneous hardware and accelerate the transition of embodied intelligence from the laboratory to industrial and home scenarios.
Core Technology and Performance
ABot-M0 has demonstrated outstanding performance in multiple industry authoritative benchmark tests. Data shows that the model achieved a task success rate of up to 80.5% on the Libero-Plus benchmark, a nearly 30% improvement over the previous industry benchmark solution Pi0. Furthermore, it set new SOTA (State-of-the-Art) records in tests such as Libero and RoboCasa.
Full Open-Source Across Three Dimensions
To address the long-standing pain points of "data silos" and "deployment difficulties" in the field of embodied intelligence, Amap's open-source release covers three key dimensions: underlying data, core algorithms, and pre-trained models:
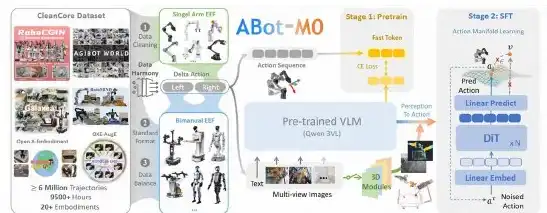
Data Level: Open-sourced the currently largest universal robot dataset UniACT. This dataset integrates over 6 million real operation trajectories and provides a complete processing pipeline from heterogeneous data to standardized training data.
Algorithm Level: Simultaneously released the model architecture and training framework. Core highlights include Amap's innovative Action Manifold Learning (AML) algorithm and Dual-Stream Perception Architecture, endowing robots with exceptional spatial understanding and action execution capabilities.
Model Level: Provided end-to-end pre-trained models and a complete toolchain. Developers can achieve "out-of-the-box" usability without building a framework from scratch, significantly lowering the barrier to adapting to industrial collaborative or home service robots.
Industry Impact
Amap's ABot-M0 technical lead stated that true general embodied intelligence requires the collective refinement of global developers. The open-sourcing of ABot-M0 is not just a sharing of technology but also aims to build a bridge connecting academic research and industrial application, enabling every robot of different forms to possess a smart, reliable, and universal "brain".