Unitree was selected by NVIDIA, but NVIDIA did not choose Unitree's hands.
While Unitree Technology passed its IPO review on the STAR Market, its H2 Plus robot was also chosen by NVIDIA as the body for NVIDIA's Isaac GR00T reference humanoid robot.
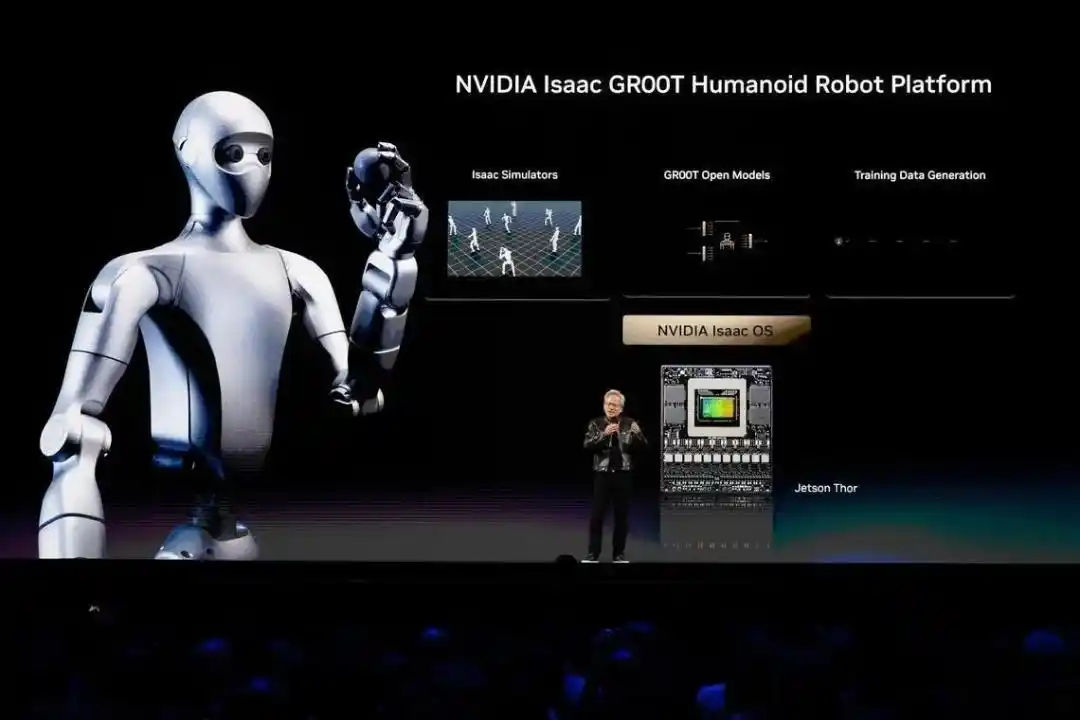
This powerful partnership has ignited excitement in both the Embodied AI and broader AI circles. After all, NVIDIA's leading position in the industry speaks for itself, and Unitree has secured its place in the global top tier of humanoid robots with its outstanding robot locomotion capabilities.
What's truly surprising is that this reference robot does not use Unitree's own dexterous hands; they have been replaced with hands from Sharpa Wave.
Sharpa is a dexterous hand company founded only two years ago, headquartered in Singapore. Its core team originates from the dexterous hand team established by Hesai Technology in 2024. It doesn't have the same high profile as Unitree, nor does it appear frequently in funding news like Lingxin Qiaoshou or Lingjiedian.
Sharpa's dexterous hands also appeared on this year's CCTV Spring Festival Gala in the sketch "My Most Unforgettable Night" featuring Shen Teng and Ma Li. However, within the niche dexterous hand sector, it remains a very low-key player.

Now, however, it stands alongside Unitree at NVIDIA's embodied AI table.
One is responsible for the body, the other for the hands.
The question is, what makes a two-year-old dexterous hand company worthy of NVIDIA's attention?
Unitree's Hands Lost This Time
In reality, Unitree does have its own dexterous hands.
Judging from its public product lineup, Unitree has already launched the Dex series of dexterous hands, ranging from three-finger to five-finger configurations, and their performance is not bad.
But what NVIDIA wanted this time might not just be "hands that can be mounted on a humanoid robot."
From a technical perspective, Sharpa's dexterous hands indeed have their advantages.
In 2024, Hesai Technology formed a dexterous hand team, which became the predecessor of Sharpa. Transitioning from Hesai's LiDAR for autonomous driving to dexterous hands seems like quite a "crossover" move for Sharpa.
To many, autonomous driving and robotics are two completely different industries.
But for a company like Hesai, there is some common technical accumulation between the two fields.
Autonomous driving requires machines to perceive, understand, and make decisions in real-time within complex environments, demanding high sensor accuracy, system reliability, and engineering capabilities. Robots face similar problems when entering the real world to perform tasks.
The difference lies in that autonomous driving solves "how the vehicle sees the world," while dexterous hands solve "how the robot touches the world."
It is precisely because of this that Sharpa migrated its past capabilities to another track. Soon after its founding, Sharpa launched its flagship product, the Sharpa Wave dexterous hand.

In the field of dexterous hands, a long-standing contradiction exists: performance and mass production are often difficult to achieve simultaneously.
Some products use underactuated designs, controlling multiple joints with fewer motors, which lowers costs but limits flexibility and control precision. Others pursue capabilities close to the human hand, resulting in complex structures, high prices, and difficulty in large-scale deployment.
Sharpa chose a middle path.
The Sharpa Wave features 22 active degrees of freedom, with overall dimensions close to a 1:1 ratio with the human hand. To achieve higher control precision, it employs a direct-drive transmission architecture, enhancing joint responsiveness and motion control capability.
However, more crucial than the number of degrees of freedom is Sharpa's investment in its tactile sensing system.
In the humanoid robot industry, an increasingly clear trend is that vision alone is insufficient to meet complex manipulation needs.
Sharpa developed a tactile system called the Dynamic Tactile Array (DTA). It integrates micro-cameras and over 1,000 tactile sensing units inside each fingertip, allowing the robot to perceive pressure changes, recognize textures, slipping, and contact states, thereby gaining a form of "tactile feedback" similar to human fingertips.
According to data disclosed by Sharpa, its tactile sensing precision can reach the 0.005N level, with a refresh rate of 180Hz; the control frequency for the entire hand reaches 500Hz, and the output force of a single fingertip exceeds 20N.
These specifications all point toward the same goal: to truly enable robots to handle objects in the real world.
This is not entirely the same direction as Unitree's own dexterous hands.
Unitree's Dex series is more closely aligned with its own integrated robot system. Whether it's the three-finger or five-finger configuration, the focus is on enabling the robot to perform grasping and manipulation within its own body, locomotion control, and development ecosystem.
In other words, it's not that Unitree's hands are inferior; it's just that for NVIDIA's reference robot, Sharpa's hands better meet the requirements.
Therefore, the value of Sharpa Wave lies in turning "touching the world" into a data entry point that robots can perceive, provide feedback on, and train with.
But specifications are just specifications. To prove that a dexterous hand truly has the ability to "touch the world," it must be demonstrated through specific tasks.
And the reason Sharpa has gained market attention is precisely because it has translated these specifications into a series of operational demonstrations that have caught the eye of its peers.
Sexy Dexterous Hand, Dealing Cards Online
At the IROS 2025 (International Conference on Intelligent Robots and Systems) product exhibition, a demonstration by Sharpa left a deep impression on the industry: a Sharpa dexterous hand drew a single playing card from a deck held in another hand and placed it on a table.

The reason it was so impressive lies in the fact that the action of dealing a playing card places extremely high demands on the force control precision of the dexterous hand and its predictive capability regarding the sliding and extraction of the card.
Furthermore, Sharpa has released a series of demonstration videos: autonomously peeling an eggshell, peeling an apple, dealing playing cards, folding paper pinwheels, and even assembling a computer case—including precisely inserting a graphics card and tightening the securing screws.
These tasks might seem like fun demos, but for the robotics industry, they represent entirely different levels of technical difficulty. Because grasping an object is not difficult; what's truly challenging is controlling the contact process.
A robot can easily pick up an egg but might not know when to increase or decrease force; it can recognize a playing card but may struggle to prevent the paper from slipping or deforming.
Many of the capabilities demonstrated by Sharpa essentially point to the same question: Can a robot adjust its actions in real-time through tactile feedback, just like a human?
This is where the DTA tactile system comes into play.
When the robot makes contact with an object, its fingertips can perceive pressure changes, friction states, and object slipping trends in real-time and feed this back to the control system for dynamic adjustment. Objects like eggs, paper, and fruit—soft or fragile—precisely highlight the value of this system.
At the same time, Sharpa is not content with being just a supplier of dexterous hands. In 2026, the company officially released its first full-body humanoid robot: Sharpa North.
At CES 2026, North demonstrated tasks such as playing table tennis, taking photos with a selfie stick, and dealing playing cards. However, the most representative demonstration was the autonomous assembly of a paper pinwheel, a task involving over 30 steps.
The entire process, from identifying parts and grasping materials to folding, assembling, and final completion, lasted several minutes and involved a large amount of bimanual coordination and sequential action planning. This indicates that the Sharpa robot possesses the potential to complete long-sequence, multi-step tasks.
From dexterous hands to humanoid robots, from a hardware supplier to a full-stack system developer, Sharpa's path is becoming increasingly clear:
It is not satisfied with being just a component of a robot. What it truly aims to do is become part of the next-generation embodied intelligence platform.
And "platform" is also a key word for NVIDIA's reference robot this time.
If the previous demonstrations proved that Sharpa's hands can perform complex manipulations, then the next, more crucial question is: What can such hands bring to NVIDIA?
Peers Are Racing to Flip the Table
For Sharpa, being chosen by NVIDIA is undoubtedly a landmark moment.
But the more critical point is that within this reference robot system, Sharpa occupies a rather pivotal position.
Because NVIDIA's goal with the "reference robot" is to build a reusable development foundation for the embodied intelligence industry, enabling developers, research institutions, and robotics companies to conduct training, verification, and development based on this framework.
In this framework, Unitree provides the body. With its locomotion control capabilities, Unitree solves the problem of how a robot stands up, walks, and moves.
What Sharpa adds is how the robot actually reaches out and does work once it stands in front of an object.
But for NVIDIA, this is not the whole story.
More importantly, Sharpa's product has been integrated into Isaac Lab. This is the most core open-source simulation training framework within NVIDIA's robotics ecosystem.
In the teleoperation phase, a human operator can control the 22-DOF dexterous hand using a data glove, mapping hand movements in real-time to robot joint movements. These recorded movements then become data for imitation learning and policy training, turning into samples that can be trained, reused, and expanded upon later.
Precisely because of this, Sharpa has secured more than just an ordinary hardware seat. It has inserted itself into NVIDIA's entire workflow, from teleoperation data collection, simulation training, policy evaluation, to real-world deployment. This is the core value of its collaboration with NVIDIA.
Of course, being favored by NVIDIA doesn't mean Sharpa has already secured victory, as the dexterous hand sector is evolving rapidly.
Over the past year or so, capital has been chasing this "hand" forward: companies like Lingxin Qiaoshou, Lingjiedian, InSight Robotics, AII Technology, Paxon Perception, etc., are all accelerating iteration around high degrees of freedom, tactile feedback, force control precision, and mass production capabilities.
Some are competing on funding speed and product deployment.
For example, Lingxin Qiaoshou has completed multiple rounds of funding since 2025, with its valuation reportedly reaching $3 billion after its B+ round in 2026, and its target valuation for the next round rumored to be as high as $6 billion. InSight Robotics also completed C1 and C2 funding rounds totaling hundreds of millions of RMB in 2026, continuing to focus on R&D for dexterous manipulation technology, innovation in core components, and product delivery capabilities.
Others are competing on tactile sensing.
Paxon Perception's product line already covers multi-dimensional tactile sensors, the DexH series of tactile dexterous hands, the humanoid robot TORA, and completed a B+ round of over 1 billion RMB in funding in March 2026.
AII Technology's new-generation dexterous hand also prominently features high-density array tactile sensors, pressure sensing capability from 0.1N to 25N, and other selling points.
This means that today's specifications—22 DOF, DTA tactile system, and NVIDIA reference design—could be surpassed tomorrow by new hands with lower costs, higher stability, or stronger data-closing capabilities.
But at least for this moment, NVIDIA has made its judgment clear:
As the industry shifts from "who can make the robot walk" to "who can make the robot work," a pair of sufficiently smart hands has become as important as its legs.
This article is from the WeChat public account "Blue Character Plan," author: Chester