Qu'a vraiment dit Jensen Huang au Forum de Davos ?
En apparence, il faisait la promotion des robots, mais en réalité, il menait une audacieuse « auto-révolution ». D'un seul discours, il a mis fin à l'ancienne ère du « stacking de cartes graphiques », mais a par inadvertance offert au secteur Crypto une opportunité inespérée ?
Hier, au Forum de Davos, Huang a souligné que la couche applicative de l'IA est en plein essor et que la demande en puissance de calcul va passer massivement du côté de l'« entraînement » vers le côté « inférence » et le côté « Physical AI (IA physique) ».
C'est très intéressant.
NVIDIA, étant le plus grand gagnant de la « course aux armements du calcul » de l'ère de l'IA 1.0, annonce maintenant activement un virage vers l'« inférence » et le « Physical AI », ce qui envoie un signal très clair : l'époque où l'on « entassait des cartes » pour entraîner de grands modèles et où « la force brute faisait des miracles » est révolue. Désormais, la compétition en IA tournera autour de la mise en œuvre des scénarios d'application, où « l'application est reine ».
En d'autres termes, le Physical AI est la seconde moitié du Generative AI.
Parce que les LLM ont déjà ingéré toutes les données accumulées par l'humanité sur Internet pendant des décennies, mais ils ne savent toujours pas comment dévisser un bouchon de bouteille comme un humain. Le Physical AI vise justement à résoudre le problème de « l'union de la connaissance et de l'action » en dehors de l'intelligence de l'IA.
Car l'IA physique ne peut pas dépendre des « longs temps de réflexe » de serveurs cloud distants. La logique est simple : si ChatGPT met une seconde de plus à générer du texte, vous trouverez cela lent, mais si un robot bipède a une seconde de retard à cause de la latence du réseau, il pourrait tomber dans les escaliers.
Cependant, bien que le Physical AI semble être une continuation de l'IA générative, il fait face à trois nouvelles problématiques complètement différentes :
1) Intelligence spatiale : Donner à l'IA la capacité de compréhension du monde en 3D.
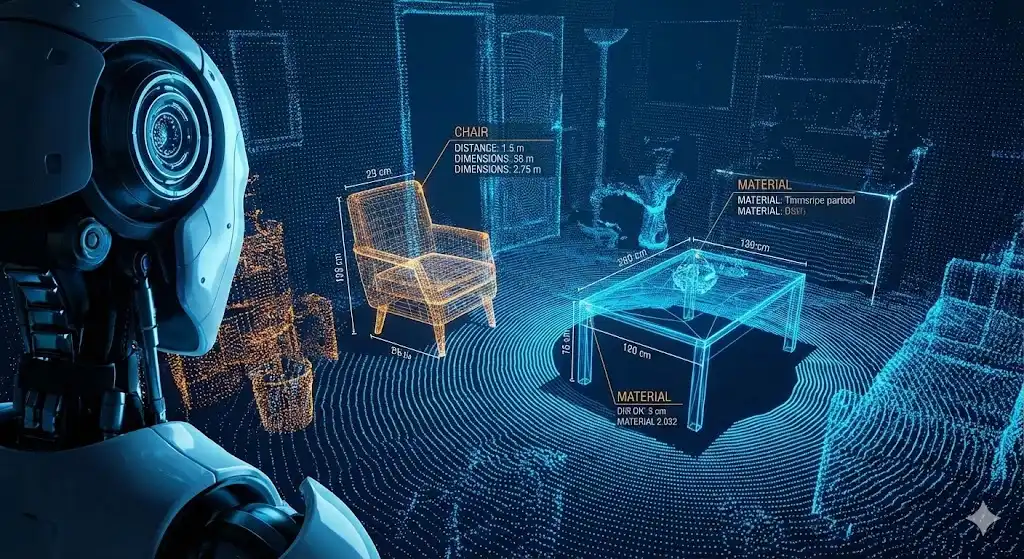
La professeure Fei-Fei Li a déjà proposé que l'intelligence spatiale soit la prochaine étoile polaire de l'évolution de l'IA. Pour qu'un robot bouge, il doit d'abord « comprendre » son environnement. Il ne s'agit pas seulement de reconnaître « c'est une chaise », mais de comprendre « la position de cette chaise dans l'espace tridimensionnel, sa structure, et la force nécessaire pour la déplacer ».
Cela nécessite des données environnementales 3D massives, en temps réel, couvrant chaque recoin, intérieur et extérieur ;
2) Terrain d'entraînement virtuel : Permettre à l'IA de s'entraîner et de faire des erreurs dans un monde simulé.
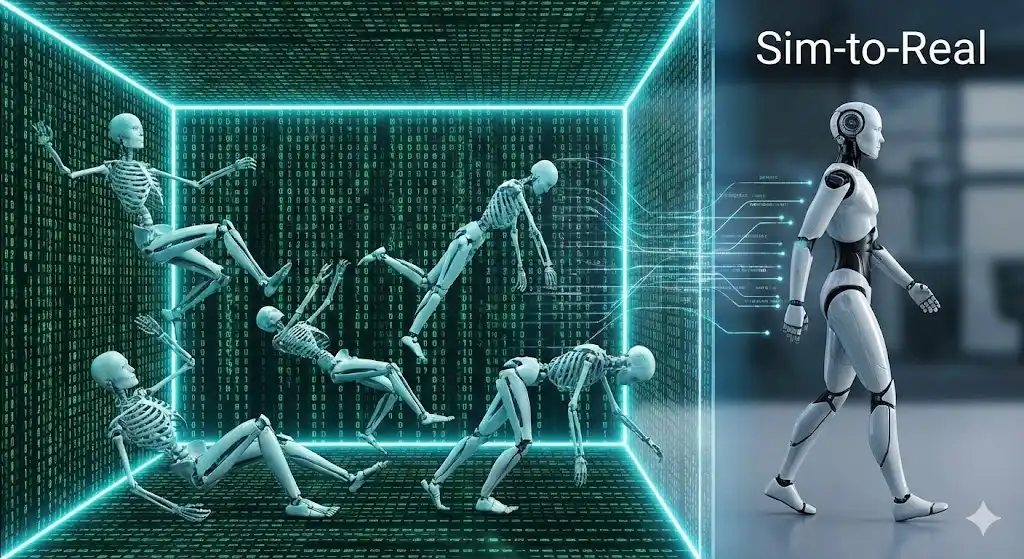
L'Omniverse mentionné par Jensen Huang est essentiellement un « terrain d'entraînement virtuel ». Avant d'entrer dans le monde physique réel, un robot doit s'entraîner à « tomber dix mille fois » dans un environnement virtuel pour apprendre à marcher. Ce processus s'appelle Sim-to-Real, c'est-à-dire de la simulation à la réalité. Si le robot devait faire ses essais et erreurs directement dans la réalité, le coût de l'usure du matériel serait astronomique.
Ce processus exige une capacité de traitement (throughput) de calcul pour la simulation physique et le rendu qui est exponentielle ;
3) Peau électronique : Les « données tactiles », une mine d'or de données à explorer.
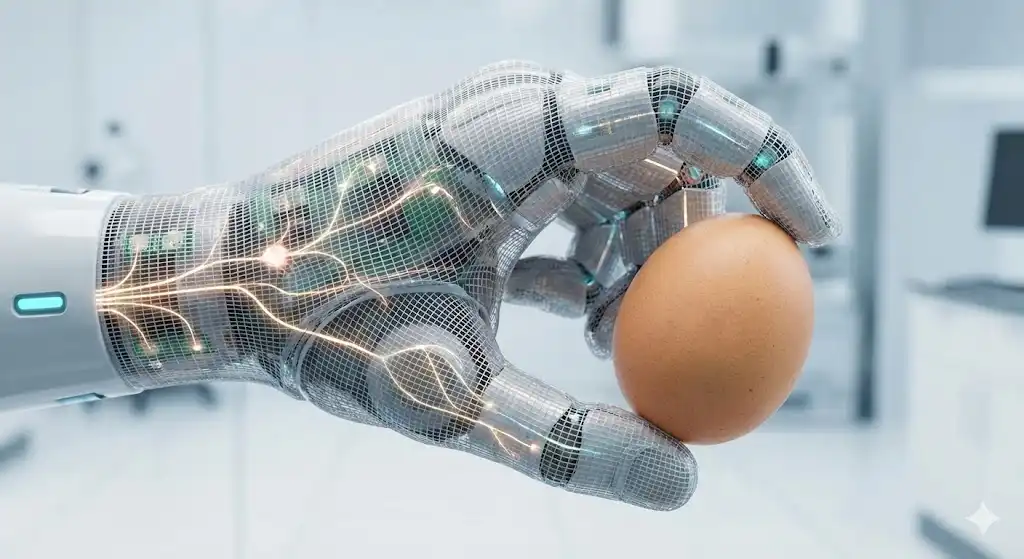
Pour que le Physical AI ait une « sensation au toucher », il a besoin de peaux électroniques pour percevoir la température, la pression, la texture. Ces « données tactiles » sont de tout nouveaux actifs qui n'ont jamais été collectés à grande échelle auparavant. Cela pourrait nécessiter une collecte massive par des capteurs. Lors du CES, la société Ensuring a展示 (montré) une « peau de production » : une seule main, densément couverte, intégrait 1 956 capteurs, d'où l'effet magique du robot épluchant un œuf.
Ces « données tactiles » sont de tout nouveaux actifs qui n'ont jamais été collectés à grande échelle auparavant.
Après avoir lu cela, vous aurez certainement l'impression que l'émergence du discours sur le Physical AI offre de grandes opportunités à de nombreux dispositifs matériels comme les wearables (dispositifs portables) et les robots humanoïdes, qui, il faut le savoir, étaient essentiellement considérés il y a quelques années comme des « gros jouets ».
En fait, je dirais que dans le tout nouveau paysage du Physical AI, le secteur Crypto a également une excellente opportunité de se positionner en complément de l'écosystème. Je vais juste donner quelques exemples :
1. Les géants de l'IA peuvent envoyer des voitures capturer des images de rue pour scanner chaque rue principale du monde, mais ils ne peuvent pas collecter les données des recoins, des ruelles, de l'intérieur des quartiers résidentiels, des sous-sols. En utilisant les incitations par Token offertes par les réseaux DePIN, et en incitant les utilisateurs du monde entier à utiliser leurs appareils personnels pour compléter ces données, il est possible de combler ces lacunes ;
2. Comme mentionné précédemment, les robots ne peuvent pas dépendre de la puissance de calcul cloud, mais pour utiliser à court terme et à grande échelle les capacités de calcul en périphérie (edge computing) et de rendu distribué, surtout pour traiter beaucoup de données de simulation vers la réalité. Utiliser des réseaux de calcul distribué pour rassembler le matériel grand public inutilisé, le distribuer et l'ordonnancer, pourrait tout à fait être utile ;
3. Les « données tactiles », outre leur application à grande échelle via des capteurs, sentent juste par leur nom qu'elles seront extrêmement privées. Comment inciter le grand public à partager ces données涉及隐私 (impliquant la vie privée) avec les géants de l'IA ? Une voie可行的 (faisable) est de permettre aux contributeurs de données d'obtenir la confirmation des droits sur leurs données (data确权) et une part des bénéfices (分红).
Pour résumer :
Le Physical AI est la seconde mi-temps du secteur de l'IA web2 annoncée par Huang. Pour le secteur de l'IA web3 + Crypto, avec des segments comme DePIN, DeAI, DeData, n'est-ce pas aussi le cas ? Qu'en pensez-vous ?