¿Qué dijo realmente Jensen Huang en el Foro de Davos?
Superficialmente, estaba promocionando robots, pero en realidad, estaba llevando a cabo una audaz 'autorevolución'. Con sus palabras, puso fin a la vieja era de 'apilar tarjetas gráficas', pero inesperadamente ofreció una oportunidad única en la vida para el ecosistema Crypto.
Ayer, en el Foro de Davos, Huang señaló que la capa de aplicaciones de IA está explotando, y la demanda de potencia de cálculo se desplazará completamente del 'entrenamiento' hacia el 'razonamiento' y el 'Physical AI (IA física)'.
Esto es muy interesante.
NVIDIA, como el mayor ganador de la 'carrera de armamento de computación' en la era de la IA 1.0, ahora proclama activamente el cambio hacia el 'razonamiento' y el 'Physical AI', lo que en realidad transmite una señal muy clara: la era de 'la fuerza bruta logra milagros' mediante la acumulación de tarjetas para entrenar grandes modelos ha terminado. En el futuro, la competencia en IA se centrará en la implementación de escenarios de aplicación, donde 'la aplicación es el rey'.
En otras palabras, Physical AI es la segunda mitad del Generative AI.
Porque los LLM ya han leído todos los datos acumulados por la humanidad en Internet durante décadas, pero aún no saben cómo destapar una botella como un humano. Physical AI pretende resolver el problema de la 'unión del conocimiento y la acción' más allá de la inteligencia de la IA.
Porque la IA física no puede depender del 'largo arco reflejo' de servidores en la nube remotos. La lógica es simple: si ChatGPT tarda un segundo más en generar texto, solo sentirás que se atasca, pero si un robot bípedo se retrasa un segundo debido a la latencia de la red, podría caerse por las escaleras.
Sin embargo, aunque Physical AI parece una continuación de la IA generativa, en realidad enfrenta tres nuevos desafíos completamente diferentes:
1) Inteligencia espacial: dotar a la IA de la capacidad de comprensión del mundo tridimensional.
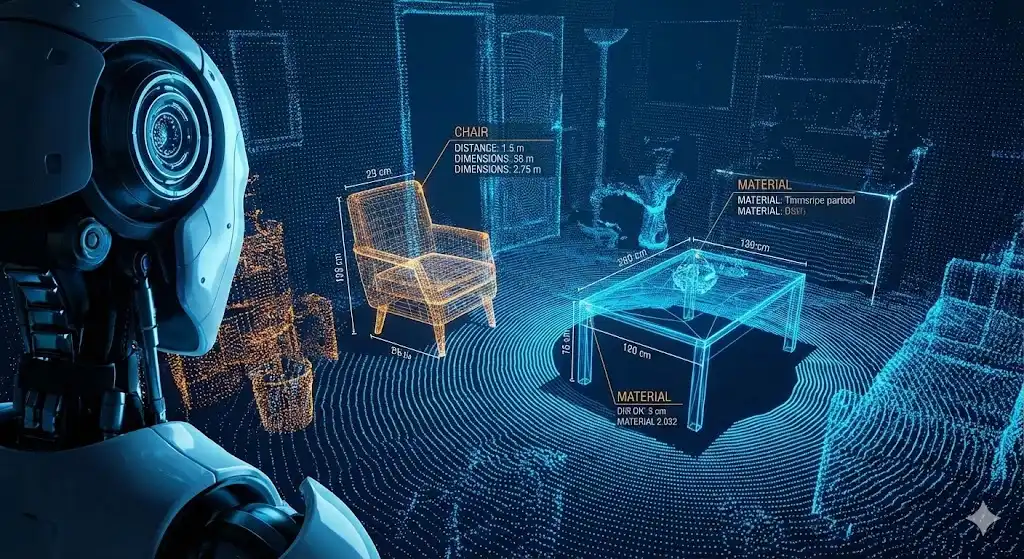
La profesora Fei-Fei Li propuso una vez que la inteligencia espacial es la próxima Estrella del Norte en la evolución de la IA. Para que un robot se mueva, primero debe 'entender' el entorno. Esto no es solo reconocer 'esta es una silla', sino entender 'la posición, estructura de esta silla en el espacio tridimensional y con qué fuerza debo moverla'.
Esto requiere una gran cantidad de datos 3D del entorno, en tiempo real, que cubran cada rincón, tanto interior como exterior;
2) Campo de entrenamiento virtual: permitir que la IA entrene mediante prueba y error en un mundo simulado.
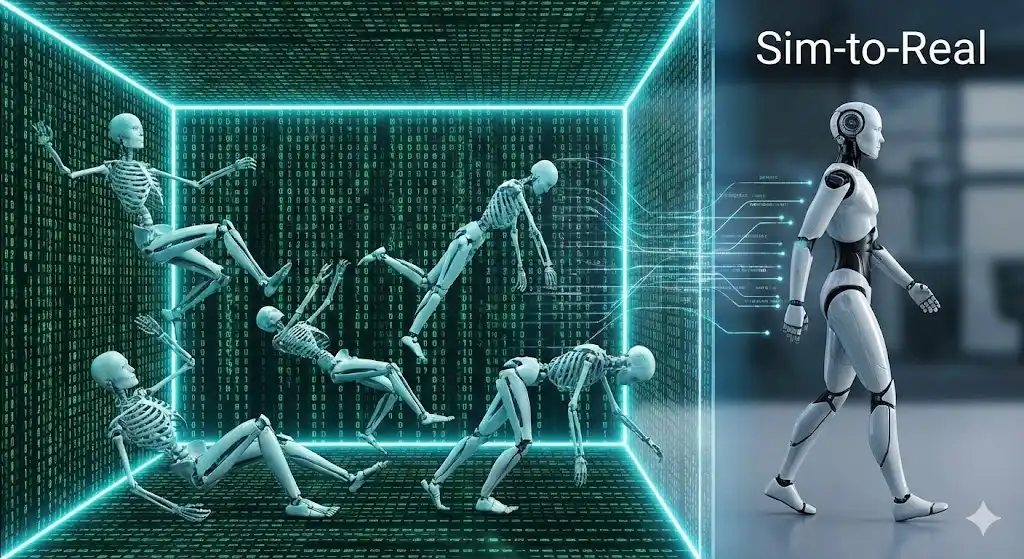
El Omniverse mencionado por Huang es en realidad un tipo de 'campo de entrenamiento virtual'. Antes de entrar en el mundo físico real, los robots necesitan entrenar 'caer diez mil veces' en un entorno virtual para aprender a caminar. Este proceso se llama Sim-to-Real, es decir, de la simulación a la realidad. Si se permite a los robots cometer errores directamente en la realidad, el costo del desgaste del hardware sería astronómicamente aterrador.
Este proceso requiere una capacidad de procesamiento de la simulación del motor físico y del renderizado que es exponencial;
3) Piel electrónica: los 'datos táctiles', una mina de oro de datos por explotar.
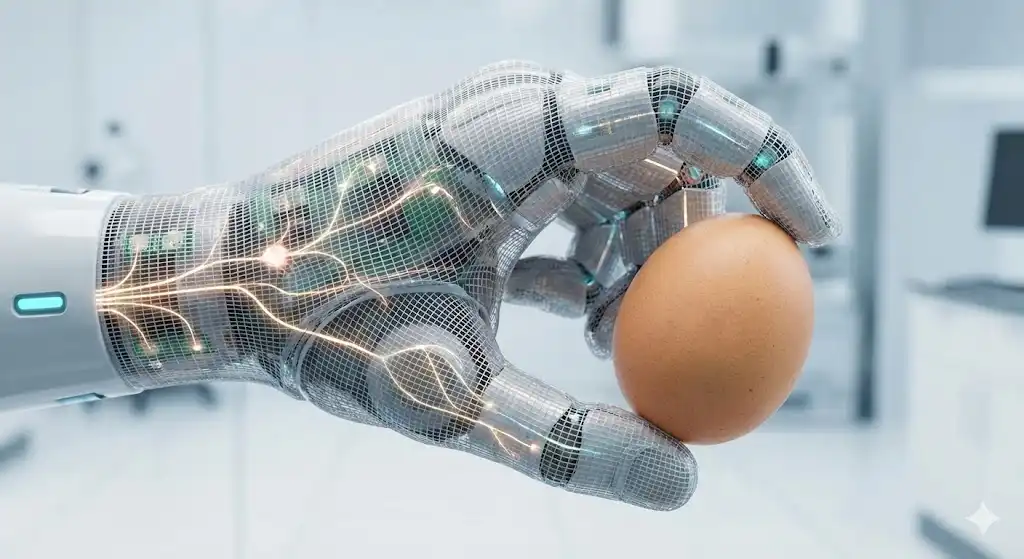
Para que Physical AI tenga 'tacto', necesita piel electrónica para percibir temperatura, presión, textura. Estos 'datos táctiles' son activos completamente nuevos que nunca antes se habían recopilado a gran escala. Esto podría requerir una recolección masiva de sensores. En el CES, la 'piel producida en masa' mostrada por Ensuring integraba 1,956 sensores en una sola mano densamente poblada, de ahí el efecto milagroso de un robot pelando un huevo.
Estos 'datos táctiles' son activos completamente nuevos que nunca antes se habían recopilado a gran escala.
Después de leer esto, seguramente sentirás que la aparición del discurso del Physical AI ofrece grandes oportunidades para que muchos dispositivos portátiles, robots humanoides y otros dispositivos hardware sobresalgan. Hay que recordar que, hace unos años, estos基本 eran criticados como 'juguetes grandes'.
En realidad, quiero decir que en el nuevo panorama del Physical AI, el ecosistema Crypto también tiene una oportunidad excelente para complementar el ecosistema. Pongo algunos ejemplos al azar:
1. Los gigantes de la IA pueden enviar coches de captura de imágenes para escanear cada calle principal del mundo, pero no pueden recopilar datos de los rincones ocultos de las calles, dentro de las comunidades, o los sótanos. Utilizando los incentivos de Token proporcionados por los dispositivos de red DePIN, movilizando a usuarios globales para complementar estos datos con sus dispositivos portátiles, es posible completar esta complementación;
2. Como se mencionó antes, los robots no pueden depender de la computación en la nube, pero para utilizar a corto plazo y a gran escala la capacidad de computación periférica y de renderizado distribuido, especialmente para muchos datos de simulación a realidad. Utilizando redes de computación distribuidas, reuniendo hardware de consumo inactivo, para distribuirlo y programarlo, ¿no podría ser útil?
3. Los 'datos táctiles', además de la aplicación a gran escala de sensores, por su nombre se sabe que serán extremadamente privados. ¿Cómo movilizar al público para compartir estos datos que involucran privacidad con los gigantes de la IA? Un camino viable es permitir que quienes contribuyen con los datos obtengan la confirmación de derechos de los datos y participen en los beneficios.
Resumiendo:
Physical AI es la segunda mitad de la carrera de IA web2 que proclama Huang. ¿Por qué no iba a serlo también para los sectores de IA web3 + Crypto como DePIN, DeAI, DeData, etc.? ¿Tú qué opinas?