World Models Shift from Prediction to Planning: HWM and the Challenge of Long-Horizon Control
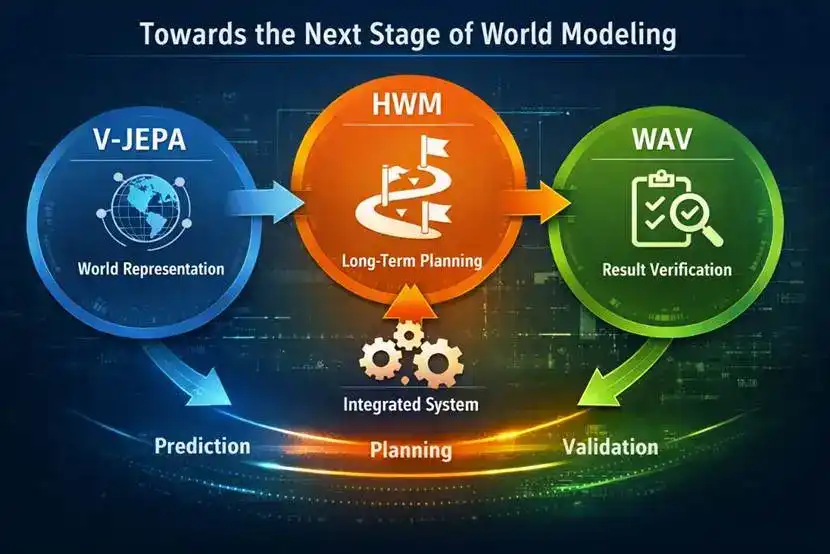
World models have evolved from focusing on representation learning and future prediction to addressing long-horizon planning challenges. While models like V-JEPA 2 demonstrate strong predictive capabilities using large-scale video pre-training, they struggle with multi-stage control tasks due to error accumulation and exponential growth in action search space.
HWM (Hierarchical World Model) introduces a two-level planning structure: a high-level planner outlines coarse subgoals over longer time horizons, while a low-level executor handles short-term actions. This decomposition reduces planning complexity and error propagation. In experiments, HWM achieved 70% success in real-world robotic tasks where flat models failed entirely.
Complementary efforts include V-JEPA (focused on representation), HWM (on hierarchical planning), and WAV (World Action Verifier, on self-correction). Together, they mark a shift from pure world modeling to integrated systems capable of prediction, planning, and verification—key to deploying world models in real-world agents and long-term tasks.
marsbitDün 10:26